Paso 10: Elaboración de control de caja para el robot







Dentro de la caja de control no pero LiPo y HC06 módulo bluetooth. Resto estará dentro.
Vea nuestras unidades de la controlador de motor. 1040 PM había cepillado controladores de motor resistente al agua. Lugar 3 de ellos dentro de nuestra caja de plástico resistente al fuego. Pegarlos en las paredes interiores de nuestra caja. Ver fotos 1 y 2
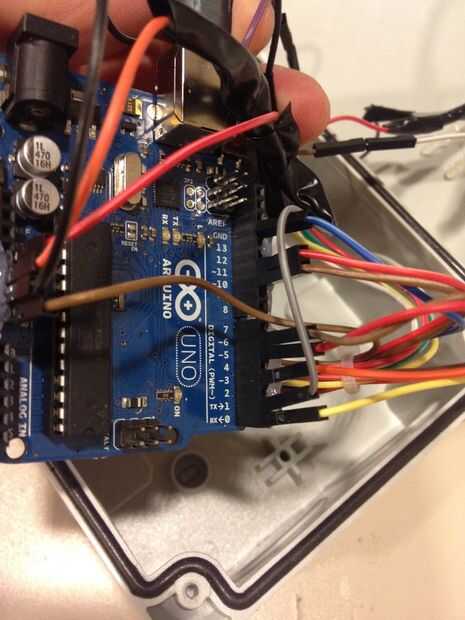
Poner Arduino dentro de nuestra caja y estabilizarlo. Hacer conexiones (pic3) y marque los cables (que es que?)
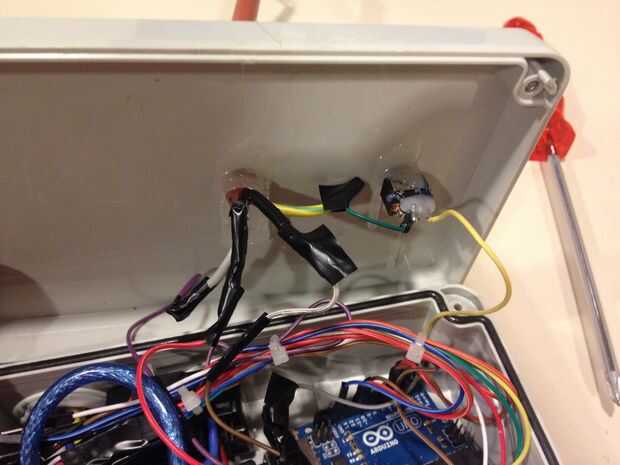
Entonces que los cables del módulo bluetooth para ir fuera de la caja de la azotea. Y el cable va desde el techo debe ser resistente al fuego con 4 núcleos internos. También poner interruptor de carga en el techo así. Véase el cuadro 4-5
Entonces todos los cables que van a conectar Lipo, servos y motores deben salir desde el lado de la caja. Ver la figura 6-7-8 y enchufe el cable de programación de arduino.
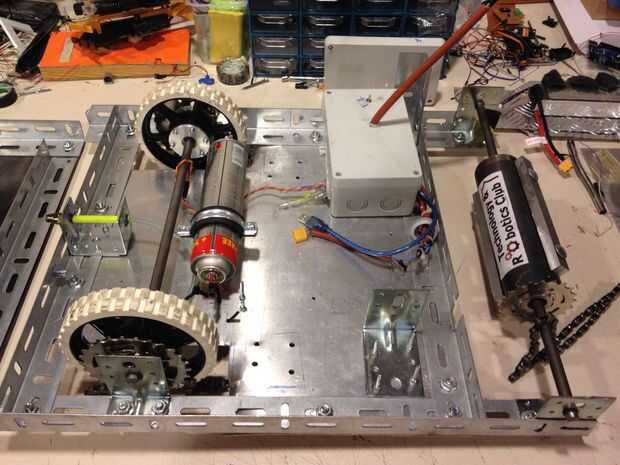
Coloque la caja sobre el chasis y estabilizar con los sujetadores. Ver fotos 9 y 10













")