Paso 4: Preparar los neumáticos Driver









Para hacer que nuestro robot se mueva suavemente este paso es importante.
Puedes ver mis llantas y algunas piezas en la primera foto. Según su decisión de llanta la parte necesita cambiará. Básicamente mi diámetro de mi llanta es de 13 cm y su grueso con el borde es de 5 cm.
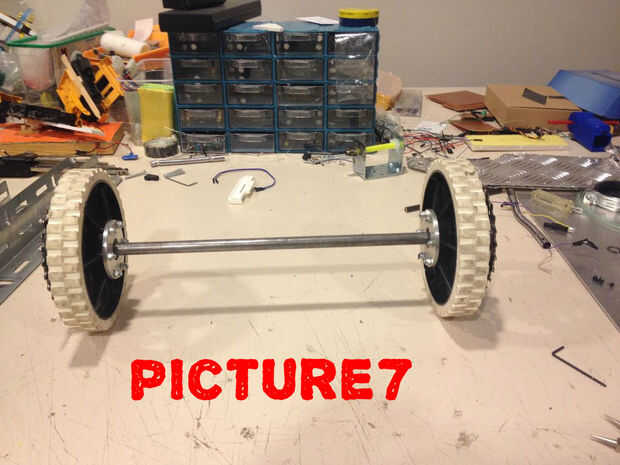
Tenemos que conectar estos 2 neumáticos con la barra de hierro que tenemos. Nuestra barra es de 45 cm de largo y tiene el diámetro de 12 mm.
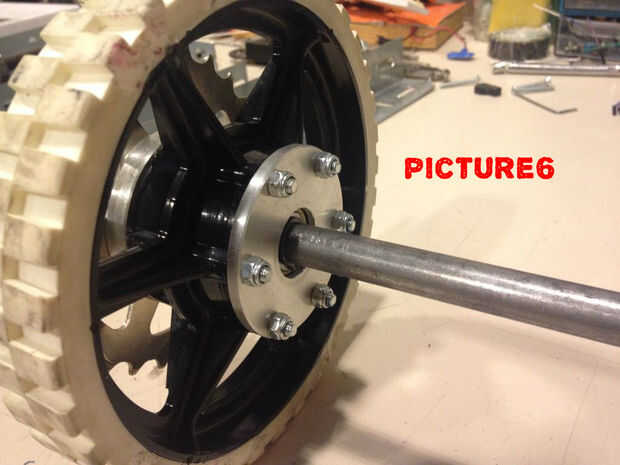
Además estamos utilizando el primer engranaje de una cualquier bicicleta. Hemos diseñado dos piezas de aluminio para sostener esta marcha y para mantener los cojinetes. Puede descargar nuestros diseños de parte. Se incluye en este paso como un archivo adjunto. Utilizamos software llamado inventor para diseñarlas. Usando el mismo software puede abrir estos archivos. Puedes ver nuestras piezas en los cuadros segundo y terceros.
Utilizamos 2 rodamientos de bolas por neumático con diámetro interior de 12 mm y diámetro externo de 28 mm para conectar nuestro neumático a nuestra barra de hierro para que ese neumático puede girar suavemente.
Para resumir, nos estabilizar nuestros neumáticos con rodamientos de bolas en la barra de hierro. Luego encapsular con nuestras piezas de aluminio y atornille junto con M4, sujetadores largos estrellas 8 cm. Ver fotos 4-5-6-7.
Mientras conectas los neumáticos en la barra no olviden esto: engranajes deben buscar fuera de la barra.
Como toque final en este paso, ponemos los anillos de retención externos (cuadro 8) para evitar que nuestros neumáticos a diapositiva izquierda y derecha en la parte superior de la barra de hierro. Con sus Sierra para metales pequeños canales abiertos en la barra de hierro para tapar estos anillos según sus posiciones de neumático. Ver las fotos 10/09/11.
Usted debe abrir 4 canales en este paso para estabilizar la llantas de la varilla.













")