Paso 6: Colocar nuestros motores de controlador y la conexión de cadena













¡ Mira el video en este paso para ver cómo va a ser como cuando nuestro sistema comienza a trabajar.
Antes de empezar a implementar este paso. Leer todo el camino hasta el final de este paso. Usted puede cambiar algunas cosas.
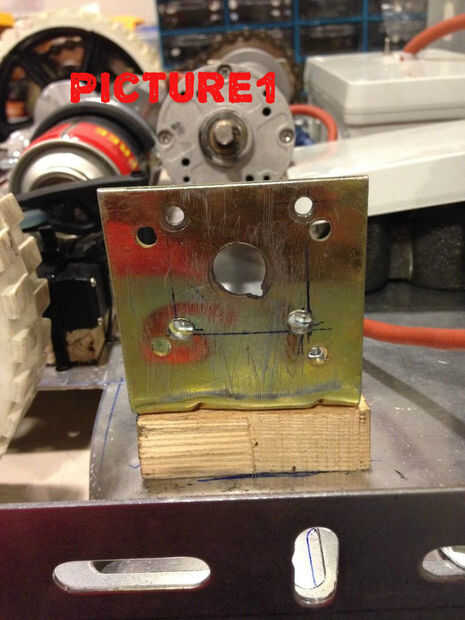
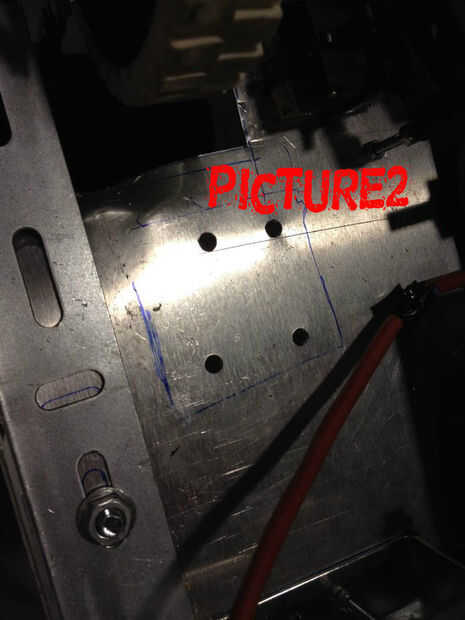
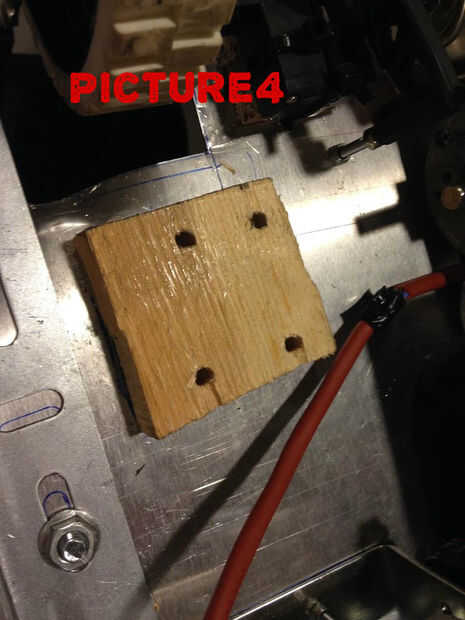
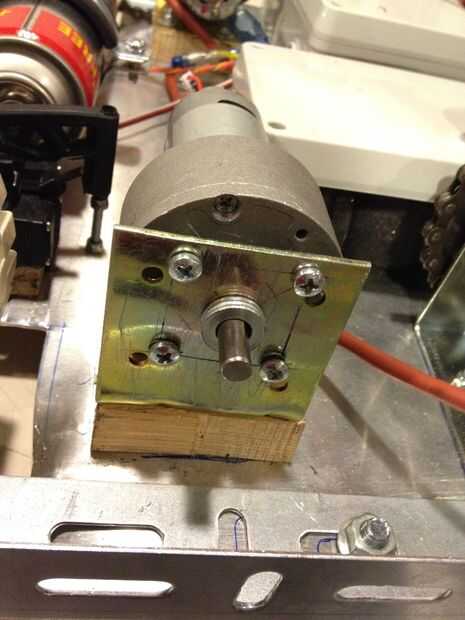
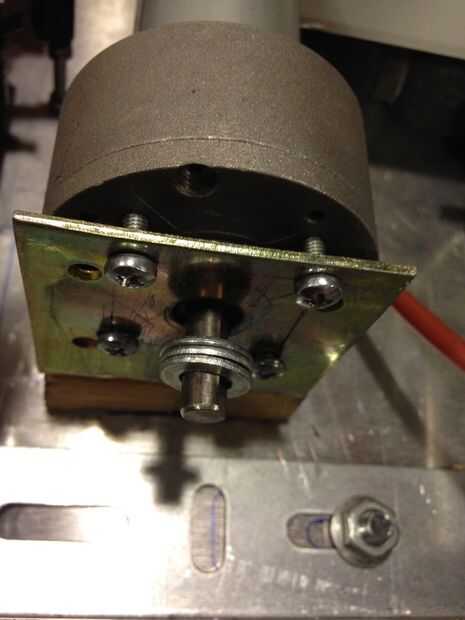
En primer lugar coge uno de L en forma de los soportes y colocar cerca de su neumático. Debe hacer esta colocación según dimensiones de su motor y su longitud de cadena (leer todo de este paso antes de empezar). Y abrir los orificios en el soporte para montar motor y también para montar el soporte en el chasis. No te olvides de abrir huecos mismo sobre su chasis también. (dimensiones de estas aberturas depende de usted - sugiero M4) Ver fotos 1-2-3. También usé el bloque de madera para elevar mi soporte. Si utilizas mucho tiempo suficiente L en forma de soporte, no lo necesitará. Ver en la imagen 4 (usar los mismos soportes del paso anterior)
Es hora de montar nuestros motores.
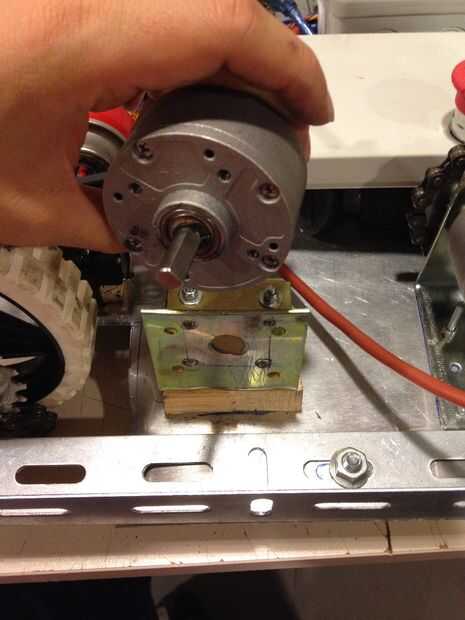
Debemos cumplir con nuestros motores. Verlas en fotos 5,6 son motores de alto torque de 385 rpm. Lamentablemente proveedor no dio ninguna información sobre su valor de esfuerzo de torsión pero puede comprobarlo observando salida de 385 rpm del motor el protón núcleo 10800 rpm. Le sugiero que utilice más poderosos.
Uno de los condensadores no polarizados con 100uF y soldadura entre + y - los bordes del motor. Ver fotos 7-8 también tomar algunas tomas para el enchufe fácil entrada y salida, soldarlos en lo borde de cables resistentes al fuego de al menos 25 cm. Y otros bordes del cable se deben soldar en nuestro motor. Recuerde que los colores de + y - ver cuadros 7 y 8
Si no soldar condensador entre ellos, el conductor del motor dejará de funcionar y usted no será capaz de mover el robot.
Ahora montar el motor en el soporte. Ver fotos 9 y 10. Las dimensiones de sujetador va a cambiar según sus requisitos de motores. Usé 4 cabeza philips fijadores por motores de M4 25 mm de largo.
Para conectar nuestros engranajes en nuestros motores, hemos diseñado una parte. Se puede ver en el cuadro 11 y nos quinto engranaje de cualquier bicicleta. Puede cambiar este equipo como desee. Vemos en el cuadro 12. Puede utilizar diferentes cambios así pero no te olvides de cambiar el diseño que ofrecemos. Y antes de comprar un cheque de engranajes de bicicleta la dimensión correcta según nuestro dibujo.
Ver nuestro dibujo en el archivo adjunto (su nombre es motor pero no es un motor: D solo un nombre) puede abrir con el software llamado inventor
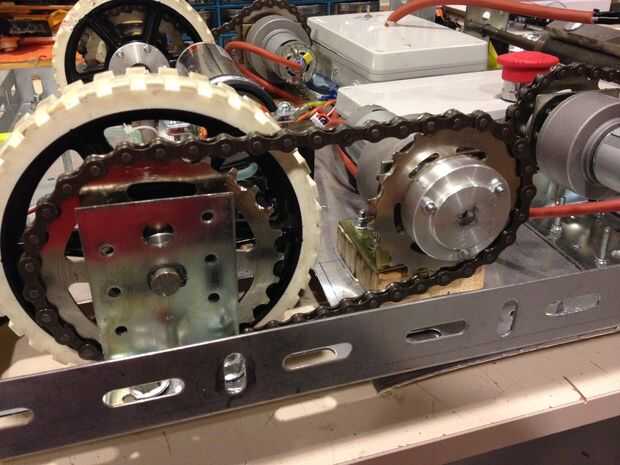
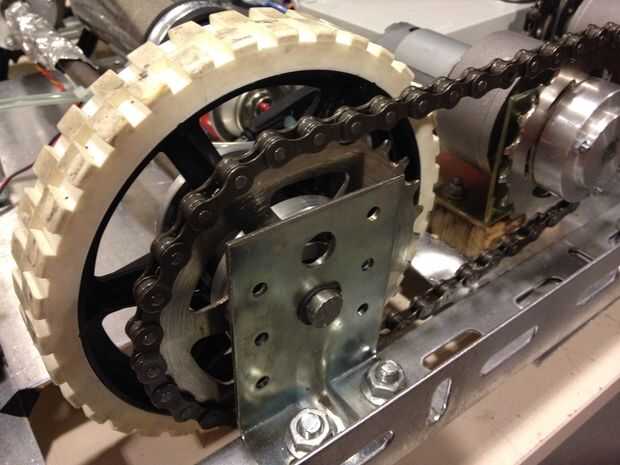
Conectar nuestro equipo parte y bicicletas diseñada con los sujetadores. Utilizamos M3 con una longitud de 4 cm para fijarlas con los tornillos correspondientes. Usted puede cambiar la longitud, puede ser un poco larga. Compruébalo antes de continuar. Puedes ver los engranajes montados en los cuadros 13 y 14
En el cuadro 15 se verá que hemos añadido dos arandelas antes de conectar nuestra Asamblea de engranaje en motor mil. Estas arandelas son de M8. Usted puede reducir su tamaño según su motor mil.
Es hora de conectar nuestra cadena. A lo que usted necesita medir correctamente la longitud. Porque usted quiere que su cadena a ser tan estrecha como sea posible si no que se puede perder en un accidente en el campo de batalla.
Debido a este hecho preparar su longitud de cadena al principio de este paso mientras está arreglando la distancia de su soporte de la llanta.
Ver las fotos 16-17-18-19-20-21 para saber cómo va a ser mirada como.
No te olvides de estabilizar piezas del engranaje conectado a mil motor mediante el tornillo de fijación o anillos de retención













")