Paso 3: Paso 3: ejecutar el código
Así que ahora que tienes todos los componentes físicos listos para ir, concentrémonos en el código usado para alimentar este artilugio (por cierto, escucho Tom es realmente bueno en la codificación.)
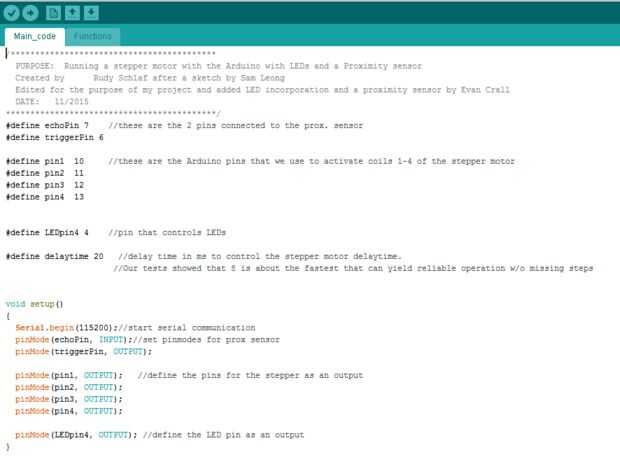
A partir de la primera imagen, vamos a correr a través del código y ver lo que logra cada pieza. En primer lugar tenemos a nuestras definiciones. Definimos los pines del sensor de proximidad, los 4 pernos de motor de paso a paso y el pin del LED. Por último, definimos delaytime como el retardo en ms entre cada bobina activar en orden de la A la D (más sobre esto más adelante).
Ahora sigamos con la configuración. Comenzamos por activar el puerto serie, que leerá los valores de la distancia desde el sensor de proximidad (porque por qué no!). Entonces, definimos el pin Eco como una entrada y el pin de disparo como una salida. También definimos los 4 pernos de motor de paso a paso como salidas y el pin LED como salida. Así que la entrada sólo que tenemos en el circuito es el pin eco.
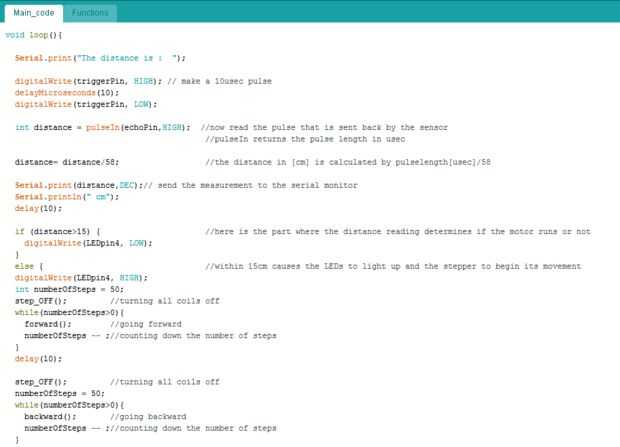
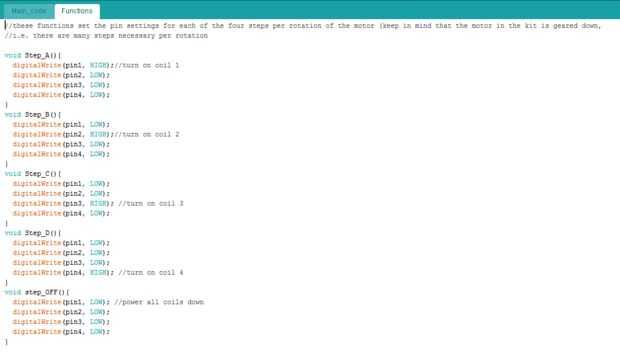
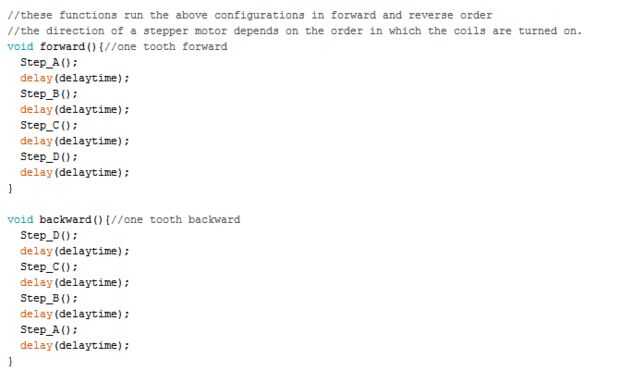
Pasar a la segunda imagen, el bucle vacío. El primer fragmento de código indica el sensor de proximidad para leer valores y convertir los impulsos a los valores de la distancia en centímetros. Entonces, tenemos un if otra declaración que establece que si la distancia es de menos de 15 cm, para activar el motor paso a paso. Ahora la otra parte del código utiliza algunas funciones definidas en otro archivo de código. Este archivo se muestra en la imagen 3 y 4. Esencialmente se define paso a D como la activación de una de las 4 bobinas dentro del motor. Entonces, cuando nos referencia a la función "forward()" las bobinas activarán en orden de la A la D, con retardo igual a "delaytime" que fue definido anteriormente. Cuanto menor sea el retraso, más rápido el motor gira porque las bobinas activan más rápidamente. Las bobinas de D a, activa la función "backward()" el motor la dirección opuesta de rotación. Ahora, volviendo a lo otro. En primer lugar, siempre y cuando la distancia es de menos de 15 cm, se activará el LED. Para determinar hasta qué punto la bobina gira, definimos una variable llamada "numberofsteps" que define cuántas veces el hacia adelante o hacia atrás función repite. Con el valor 50, el motor paso a paso recorre 50 ciclos avance, pausa de 10ms y recorre 50 ciclos hacia atrás. Mientras el motor está en movimiento, el LED permanece encendido.


 ornamento")









")
