Paso 6: CONTROL PID explicó
* Más controladores de temperatura tienen tres ajustes de salida de control: (nuestro modelo sólo tiene PID y ON/ajustes en él.)
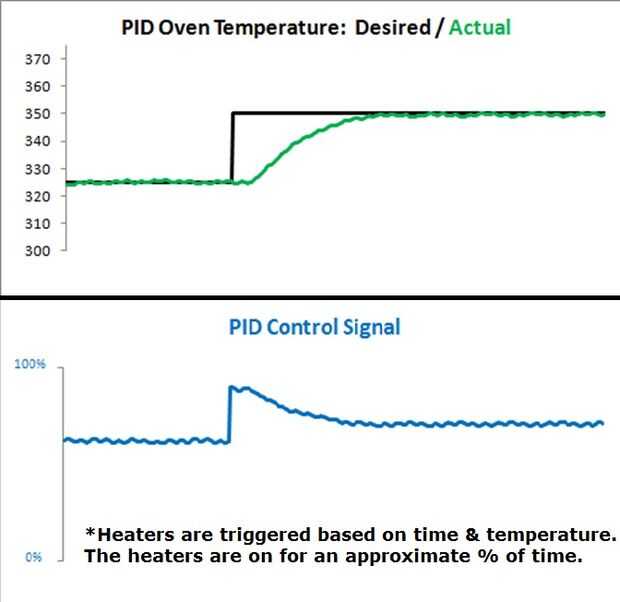
PID: Utiliza retroalimentación de tiempo y de temperatura para ajustar la salida.
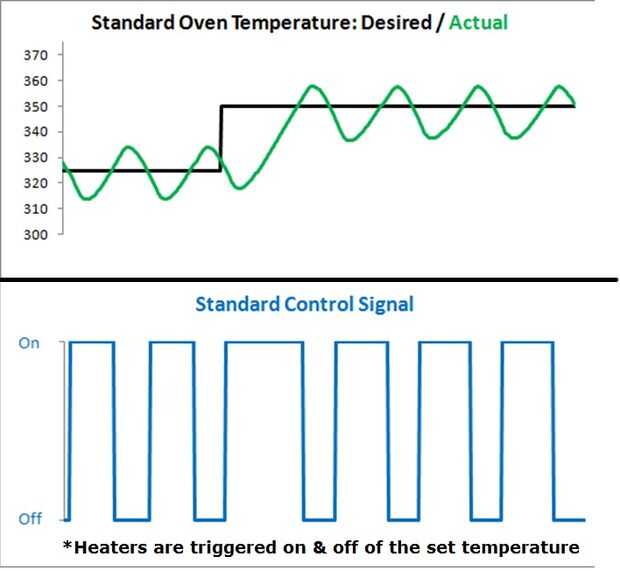
SIMPLE de encendido/apagado: Utiliza realimentación de temperatura para ajustar la salida.
Ciclo de trabajo: Utiliza retroalimentación tiempo para ajustar la salida.
La opción de Control del PID es lo que realmente hace que este aparato tan de gran alcance. Cuando se sintoniza correctamente, este dispositivo puede controlar temperatura con excelente precisión. Funciona tan bien porque el PID es un mecanismo de retroalimentación de lazo de control que puede ser utilizado en cualquier proceso que cambia con el tiempo (si reacciona como era de esperar entradas y puede alcanzar un estado estacionario). Aquí es posible mi mejor explicación del control PID en los términos más a la tierra.
P = control proporcionado respuesta. Utiliza la diferencia medida entre el deseado temp y real temp (el Error) para calcular cómo responder. Si tu error es enorme, el proceso de control se aplica más agresivamente (es decir, dejar calentadores en ya si desea mucho de medida temp temp). Cuanto mayor sea el error, mayor será la corrección.
Pero dosificación no lidiar con las fluctuaciones repentinas muy bien. Si una ráfaga sopla todo el calor de su horno brevemente, el control de p por sí mismo responder demasiado y la explosión del horno con una respuesta de gran alcance que sería adelantar el objetivo.
Control derivativo: Literalmente, mide la tasa de cambio del error(Error/tiempo,) dentro del sistema. Si el horno enfriada drásticamente en un período de 2 segundos, control D sabe no sobre explosión de su sistema. Limitará la respuesta proporcionada y parada de calefacción antes ya que conoce el overshoot llevará a la temperatura adecuada.
Pero si la tasa de cambio es lenta (es decir, tu horno es muy gradualmente refrescarse cuando se supone que es en estado estacionario), el control D no responde porque el cambio es muy gradual, y el control de P se proporcióna demasiado bajo ya que sólo es apagado por un poco. Para alcanzar la perfección es necesario el control integral.
Control integral: Esto mide la magnitud del error con respecto a cuánto tiempo el error ha sido presente (Eerror * tiempo), se aumenta su contribución de salida más el error. I controlar la clase de lo contrario de control D y es muy bueno para la corrección de errores de estado estacionario.
Lo realmente interesante es que no todos los sistemas pueden ajustarse. Imaginar un horno que tiene la puerta abierta y cerrada intermitentemente al azar. El control PID puede manejar algunos fluctionations pero si el sistema controlado posiblemente no puede alcanzar un estado estacionario entonces PID no funcionará bien.
Si lees el rascarse la cabeza no te preocupes. Este controlador de temperatura cuenta con un botón de "autotune", por lo que puede averiguar cómo hacer que todos los que trabajan en su propio!

")











