Paso 4: esquema
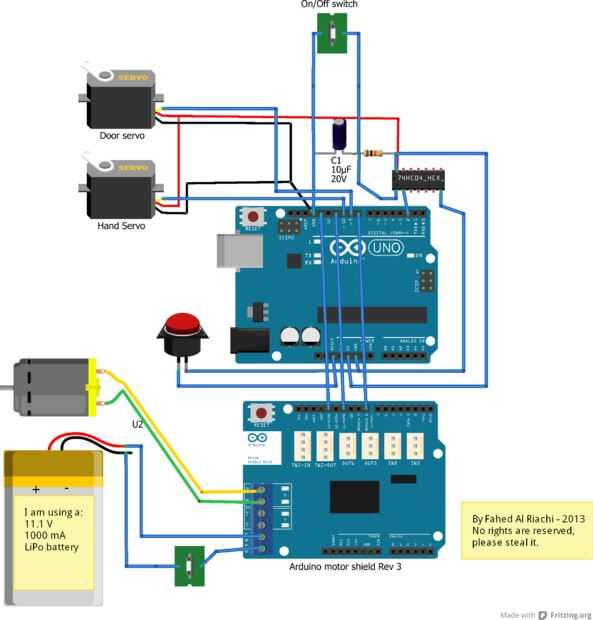
Superior de parte: El arduino principal Junta, 2 servos y switch conectividad. Tenga en cuenta que como se mencionó anteriormente le puede sustituir el circuito debounce entero (arriba-derecha) con un simple resistor/interruptor.
"Puerta" y "la mano" los servos son alimentados directamente desde el pin de 5v de Arduino. Se conectan los cables de señal al pin 9 y 10, respectivamente. Estos pines PWM es compatible, así que estoy usando para el control de posición y ángulo del servo (de 0 a 180 grados máximo).
Nota: el botón rojo es simplemente un reset (similar a la encontrada en la cara de la placa arduino). He añadido para tener un acceso rápido para restablecer el software de placa en cualquier momento sin necesidad de abrir la caja. Simplemente se conecta el pin RESET a tierra para hacer el reset.
Parte de fondo: es necesario si desea utilizar un motor de DC y moverse la máquina. Este es el escudo del motor de arduino, se monta encima del Arduino, por lo que todos los pernos de ambas tarjetas se conectan uno al otro. Estoy mostrando les abajo como separados para mayor claridad, suerte! Este escudo puede controlar hasta 2 motor de la C.C. (2 canales A / B) con increíble facilidad. Estoy usando uno ahora. Permite establecer en el código, la dirección, velocidad y pausas de cualquiera de los 2 canales/motores disponibles. Estoy usando canal B como se muestra a continuación. donde pin
13 para la dirección, pin 11 para velocidad y pin 8 para el control de frenos.
La batería es un 11.1 / 1000 mA, conectada a la pantalla, así la alimentación el motor de la C.C., la placa arduino principal y los servos. Si no usas el escudo, entonces usted puede conectar directamente la batería para el cañón de energía en el tablero principal de arduino.













