Paso 21: Heads up & go!
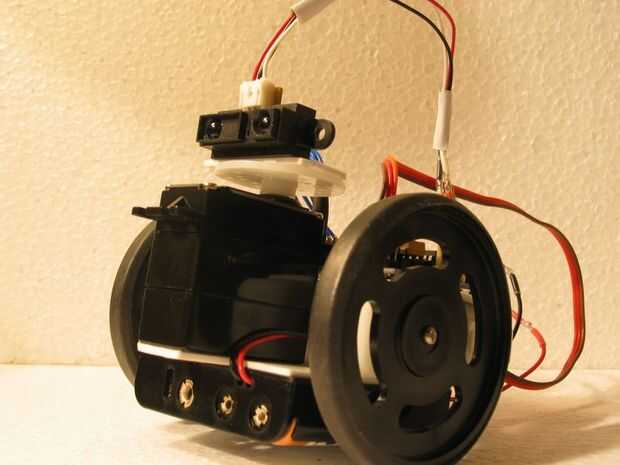
Realmente han hecho un robot. Ahora la diversión comienza, se puede programar para hacer nada y colocar nada a él, ampliar de alguna manera. Estoy seguro que ya estás lleno de ideas, y es probable que no se me han seguido esta manera ;)
El diseño puede cauteloso, que pueda haber utilizado otras partes etc... Pero si ha conectado como se describe, he aquí algunos consejos para empezar a programar tu robot:
Entrar en (copiar y pegar) este código en el editor y presione F5 mientras el robot está conectado:
Nota: El código se verá mucho más agradable una vez que llegue a su editor, reconocer órdenes y darles colores.
+++
principal:
readadc 1, b1 ' la tensión volvió a la clavija analógica 1 y los pone en la variable b1
de depuración ' esto dibuja hacia fuera todas las variables al editor.
Goto principal
+++
Ahora toma tu mano frente a la cabeza del robot y observe cómo la variable b1 cambia valor. Puede utilizar los conocimientos adquiridos para decidir lo que debe suceder cuando (cómo cerrar cosas deben recibir antes de..)
Ahora te aconsejo poner tu robot para arriba en una caja de cerillas o similares, como las ruedas comenzarán a girar.
Entrar en (copiar y pegar) este código en el editor y presione F5 mientras el robot está conectado:
+++
alto 4
5 bajo
+++
Una de las ruedas debe girar en una dirección. ¿Se vuelve hacia delante de las ruedas? Si es así, esto es la instrucción para que la rueda a girar hacia adelante.
Si la rueda gira hacia atrás, usted puede intentar esto:
+++
4 bajo
5 alta
+++
Para activar la otra rueda, es necesario introducir
6 alta
7 bajo
(o al revés para la dirección opuesta.)
El servo que ya han probado.
Hacia un lado es:
servo 0, 75
el otro lado es:
servo 1, 225
- Centro:
servo 1, 150
Aquí es un pequeño programa que (si, si todo va bien, e Introduzca los parámetros correctos para alta y baja para el cableado de los motores) hacer el robot conducir alrededor, parada frente a las cosas, mire a cada lado, para decidir cual es el mejor, ponga eso y conduce hacia nuevas aventuras.
+++
Símbolo dangerlevel = 70' ¿a qué distancia lo deben, antes de reaccionar?
Símbolo de giro = 300' Esto establece cuánto debe girarse
Símbolo servo_turn = 700' Esto establece por cuánto tiempo debemos esperar para que el servo girar (dependiendo de su velocidad) antes de medir distancia
principal: ' bucle principal
readadc 1, b1 ' Lee cuanta distancia por delante
Si b1 < dangerlevel entonces
peligros de GoSub ' si nada adelante, impulsar
otra cosa
GoSub whichway ' si obstáculo adelante decide qué manera es mejor
terminar si
Goto principal ' Esto termina el bucle, el resto son solo sub rutinas
peligros:' esto debe ser tu combinación para hacer el robot hacia adelante, estos probablemente necesitará ajustar para adaptarse a la forma han conectado sus motores robots
5 alta: alta 6: baja 4: baja 7
volver
whichway:
totalhalt GoSub ' primera parada!
' Buscar una manera de:
GoSub lturn ' mirar a un lado
pausa servo_turn ' esperar a que el servo que se terminó convirtiendo
totalhalt GoSub
readadc 1, b1
«Miran para otro lado:
GoSub rturn ' mirar para otro lado
pausa servo_turn ' esperar a que el servo que se terminó convirtiendo
totalhalt GoSub
readadc 1, b2
' Decidir cual es la mejor manera:
Si b1 < b2 entonces
GoSub body_lturn
otra cosa
GoSub body_rturn
terminar si
volver
body_lturn:
6 alta: baja 5: baja 7: alta 4' esto debería ser la combinación que convierte al robot de una manera
vuelta de la pausa: totalhalt gosub
volver
body_rturn:
alta 5: baja 6: baja 4: alto 7' debe ser la combinación que convierte al robot al revés
vuelta de la pausa: totalhalt gosub
volver
rturn:
servo 0, 100' mirar a un lado
volver
lturn:
servo 0, 200' mirar para otro lado
volver
totalhalt:
baja 4: baja 5: baja 6: baja 7' baja en todos los 4 detiene el robot!
Servo 0,150' adelantar de la cara
espera 1' congelar todo por un segundo
volver
+++
Con algunos inteligente de programación y ajuste, usted puede hacer el robot, it´s cabeza, tomar decisiones, hacer pequeños ajustes, girar a hacia â € interesante holes†como las puertas, todos trabajando al mismo tiempo, mientras se conduce. Se ve muy bien si haces el giro del robot mientras la cabeza gira ;)
¿Para algunos más había avanzado código? Revisa esto: http://letsmakerobots.com/node/25
Sonido:
También puede añadir un pequeño Altavoz con conector de ejemplo (salida) 1 y la tierra y escribir
Sonido 1, (100, 5)
- o dentro del programa del ejemplo anterior
Sonido 1, (b1, 5)
-para obtener sonidos divertidos dependiendo de la distancia a los objetos por delante.
También puede colocar una lámpara o un LED al pin 2 y tierra y escribir (recuerda LED necesita dar vuelta a la forma correcta alrededor de)
2 alta
para encender la lámpara, y
Baja 2
para desactivar ;)
-¿Por qué una pluma Laser, montado en un servo adicional? Entonces podría hacer el robot gire el láser alrededor y encender y apagar, señalando lugares...
- Añadir un marcador en él (tal vez en un segundo servo, por lo que puede tomar en y el papel?) y le enseñaremos a escribir el número de veces que mueva la mano frente a ella en un pedazo de papel.
- Convertirlo en un "cat-get-down-from-the-chair"-guardian-robot, sacudida cuando el gato viene cerca.
- Hacer que perseguir a otro robot (o gato) Obtendrá en algunas buenas rutinas de persecución de esta manera!
- Hacer que buscar el medio de una habitación
- Hacerla actuar como un ratón; Congelar si hay movimiento a la vista y siempre pasar cerca de las paredes y buscar huecos pequeños para entrar en.
También podría desmontar un viejo coche de juguete, saque los componentes electrónicos, excepto los motores y el dispositivo de giro y enganchar encima de su tablero, servo y sensor - habrán dado vida a su vehículo :)
También intentar leer parte de la documentación, se tiene sentido ahora que tienes una ventaja, puedes hacer algo ahora!
Bienvenido a un mundo muy divertido del robots caseros, hay miles de sensores y actuadores a la espera de gancho y hacer robots de ellos :)
Ahora tomar algunas fotos de tu robot y enviarlos a mí en letsmakerobots.com - C ya ;)

")











