Paso 3: El Hardware de código abierto
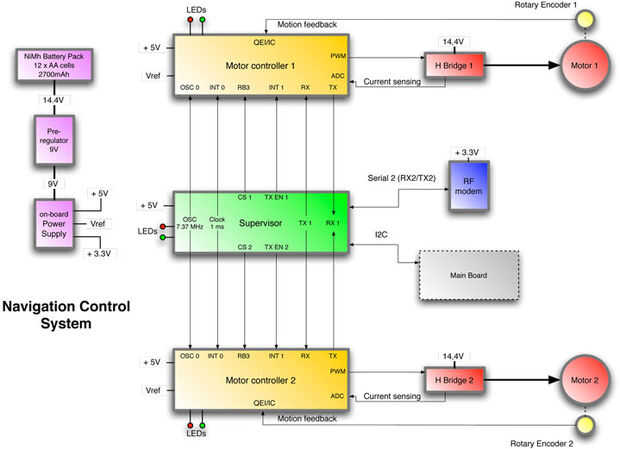
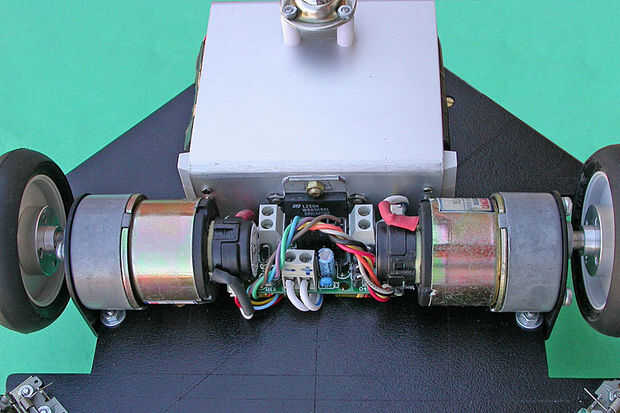
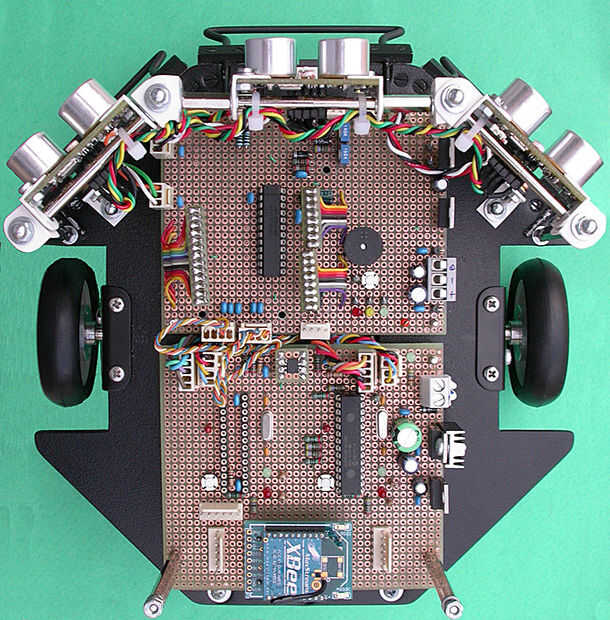
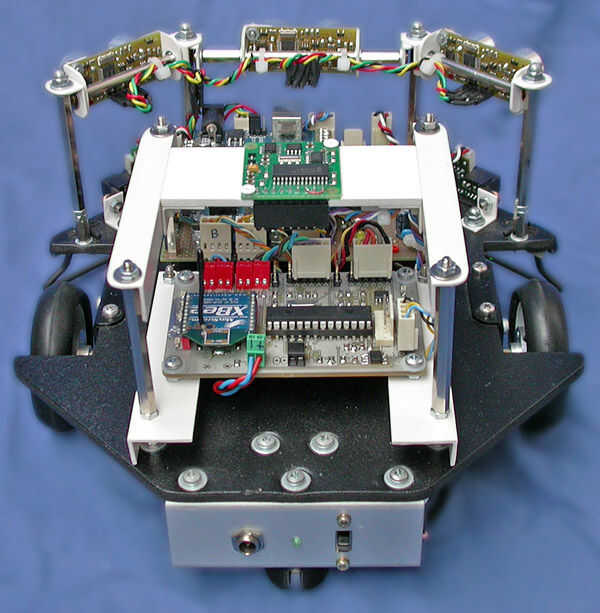
El subsistema de control de navegación se compone de la dsNav como la Junta "inteligente" del sistema y una placa de puente H dual basado en L298 para controlar los motores del engranaje 12V (Hsiang Neng HN-GH12-1634TR). La regeneración del movimiento viene de un par de 300 codificador de cpr (los E.E.U.U. digital e4p-300-079-ht).
La comunicación con el mundo externo se realiza a través de las dos interfaces seriales UART; uno para telemetría y la otra para obtener datos de placa de sensores. El módulo XBee se puede conectar a la UART1 UART2 a través de los puentes JP1 y JP2. Para otro tipo de conexiones existen enchufes J1 y J16. Puerto COMM1 (J16) puede emplearse para una comunicación I2C gracias a la capacidad de seleccionar pin periféricos de la serie dsPIC33F.
El diagrama esquemático original en formato de Eagle se puede encontrar aquí:
http://www.guiott.com/Rino/dsNavCon33/dsNavCon33_Eagle_project/DsPid33sch.zip
Como se puede ver el esquema es tan simple que se puede implementar en un perfboard como lo hice. Si no desea utilizar este sistema y no desea realizar su propio PCB, un comercial basado en mi obra original y totalmente compatible con el software de código abierto está disponible en: http://www.robot-italy.com/product_info.php?products_id=1564
, la temperatura y la humedad (DHT11)")






")





