Paso 5: El cerebro


Utilicé un conector de un módulo de pc para conectar el ápice powerboard la fuente de alimentación
Si conectas el rojo y en blanco para un multiemeter
Usted wil ver 5v (para los servos y el sensor de distancia)
Ápice amarillo y negro obtener 12v (para el arduino)
Lo que hice es pritty simple
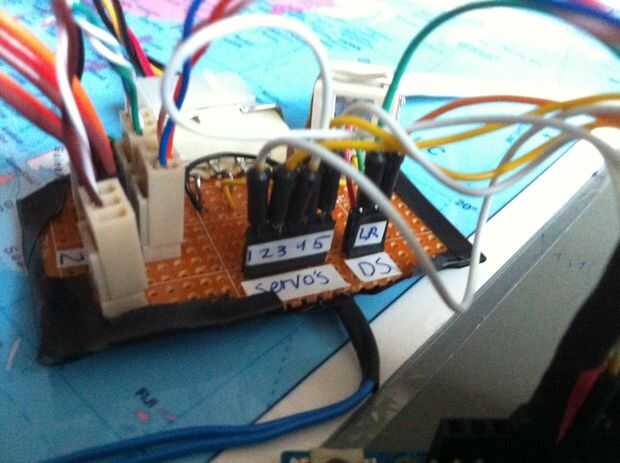
Hice 5 conectores de servo, suelde el positivo en parall a 5v y el negativo a tierra
Hice el mismo ápice el sensor ds
Luego de la soldadura de algunos pinheaders y conectado los pines de las señales de los servos que pinheaders y los 2 pernos de middel de sensor también.
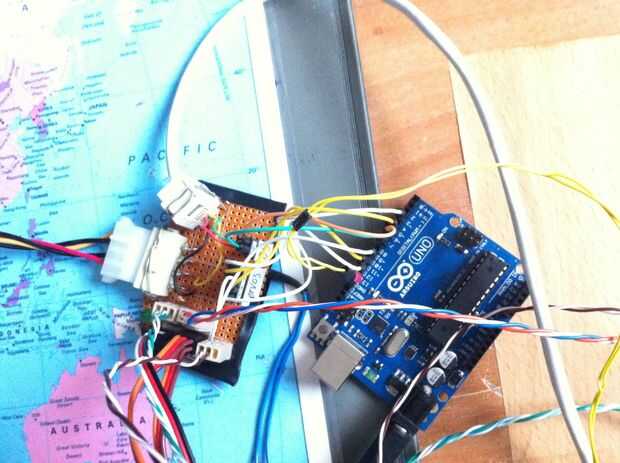
Ahora podemos conectar whit arduino usando algunos puentes
no importa pin whits conectarlo a arduino. Como dices en tu programa que es conectado a ese pin.
En la powerboard yo también anuncio un led para indicar el poder está en. Sólo tiene que añadir una ressistor de 100 ohm a 5v y el otro y la llevaron a tierra. Y listo. :)
10mm sobre el robot sólo está conectado el arduino, un ressistor de 100 ohm va del pin 13 con el conector positivo de los led y el negativo va a tierra.
puede activar su encendido y apagado en le programa.
He utilizado 5 servo connector´s para 6 servo´s, beceaus la 2 servo´s en el bottem está usando la misma señal. debe soldar los cables al comprador y conectar a la placa de potencia
Ahora necesitamos algún poder, don´t utilizar un adaptador para esto, simplemente can´t handel el poder del brazo de lo que necesita.
Utilice una fuente de alimentación de pc, sólo tiene que conectar el ápice verde alambre un alambre negro. y la alimentación run´s y give´s de energía.
Si usted don´t conectar estas wire´s nada, necesita unen estas wire´s.
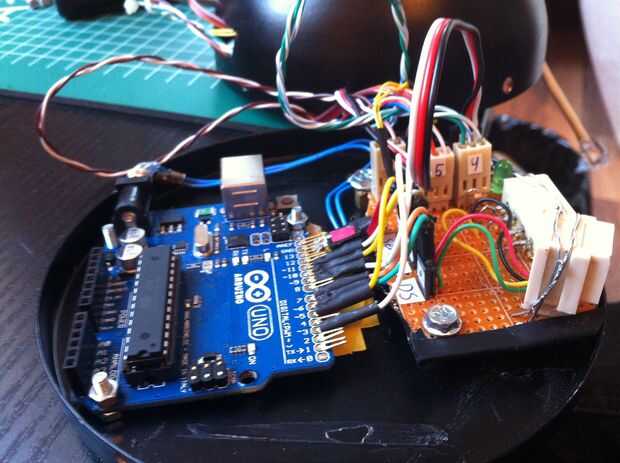
los pines de señal de los servos, puede simplemente conectar a un canal pwm en su arduino. que es el ápice de pasadores esta antes de él ~
el sensor de distancia puede conectar al pin 6 y 7. y el led 13 y tierra. que es a los pernos que necesita utilizar.
lo doesn´t materia cómo cennect el servo´s tan largo como este symboly ~ está parado para el número de pin.
Ahora usted puede programar el arduino
Asegúrese de que se da la vuelta la alimentación apagado antes de pluging el cable usb.
Y quite el usb para probar el código en su brazo robótico.
otherwishe la aruido recibe 5v de lo usb y 12 de la fuente de alimentación
y la energía del usb va la alimentación y el sut de sien powersuppply abajo (por seguridad ressons).
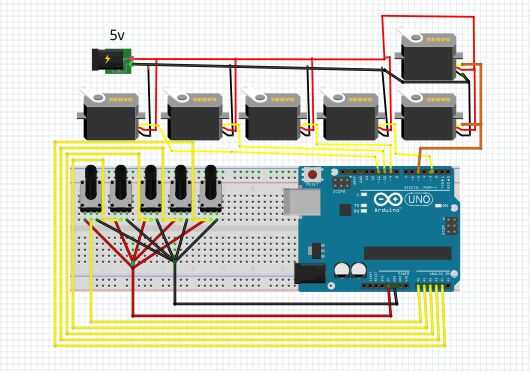
El conector de teléfono que se puede ver en la fotografía es sólo un conector para el sensor de distancia. Pero puede usar cualquier conector que te gusta.
como se puede ver en el scematic, anuncio un potenciómetro para controlar el servo. el fino sólo tienes que hacer es repetir este ápice 5 señales voor el 6 servo´s. el pote no es nessersery sino el código won´t si no anuncio el Potentiometer´s.
la 5 puede potenciómetro solo conectar a anolog pin 0,1,2,3 y 4




")



")




