Paso 6: Programa y uso



Por ejemplo se puede decir
myservo.writeMicroseconds (algo entre 0 y 3000)
De esta manera usted puede hacer un movimiento agradable.
voy a uplode un video para más detalles pronto.
Si usted es mejor utilice el sensor de distancia y que reaccionan a eso (véase el paso siguiente).
Usé 5 potenciómetro para controlar el brazo (si quiere que puede utilizar 1 potentionmeter y dos joysticks, si los tienes). el scematic puede usted encontrar en el stap de previos. el código puede encontrar aquí.
apenas enchufe todo y pasar un buen rato.
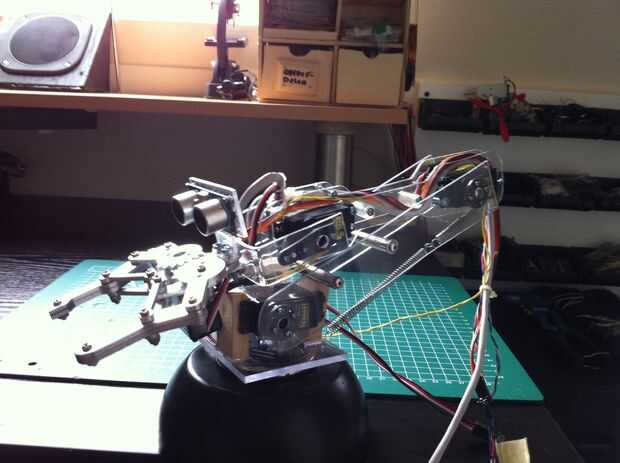
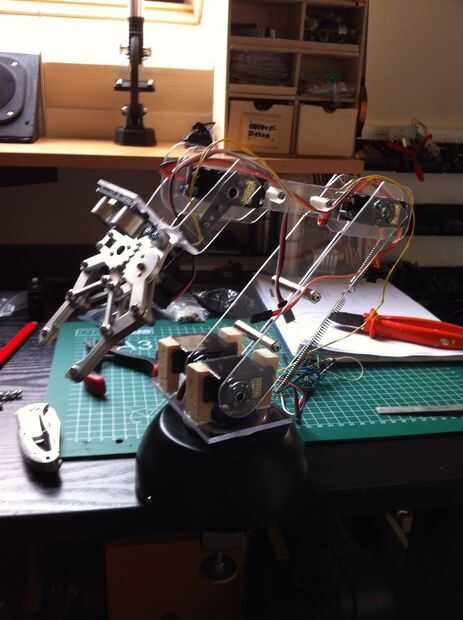
Aquí hay algun video del trabajo de im brazo
Espero que os guste. Y tener una idea sobre cómo hacerlo propio.
el video:
http://www.youtube.com/watch?v=N9z7OQLlhrE
http://www.youtube.com/watch?v=jozshuI246o&feature=youtu.be
http://www.youtube.com/watch?v=onQIzR5C8qk
https://www.youtube.com/watch?v=NkxTk2-RJ8A
que te:
http://youtu.be/xH1IZFku0w0
Lo siento si mi espanol no era bueno, pero hago mi mejor esfuerzo.
En el video NOC ver la robótica del brazo cómo está ahora. tuve que cambiar mi diseño un par de veces y sustituir piezas. Y beceaus el servo servos usé al principio, eran débiles es necesario utilizar un mg995 o mg946, sólo el servo para la mano y para girar el brazo, puede ser un servo barato (s3003 futuba), pero un mg995 o mg946 sería mejor
el código.
Control de una posición de servo con un potenciometro (resistencia variable) #include
modificado por Attila Tullner
potenciometro de ohmio 10 k
int led = 13; int potpin = 0; pin analógico utilizado para conectar el potenciómetro void setup() void loop() Val = analogRead(potpin1); pin analógico servo 2 1 Val = analogRead(potpin2); pin analógico servo 3 2 Val = analogRead(potpin3); pin analógico servo 4 3 Val = analogRead(potpin4); pin analógico servo 5 4
Servo myservo1;
Servo myservo2;
Servo myservo3;
Servo myservo4;
Servo myservo5;
int potpin1 = 1;
int potpin2 = 2;
int potpin3 = 3;
int potpin4 = 4;
int val; variable para leer el valor del pin analógico
{
myservo1.Attach(3);
myservo2.Attach(5);
myservo3.Attach(9);
myservo4.Attach(10);
myservo5.Attach(11);
pinMode (led, salida);
}
{//servo 1 pin analógico 0
Val = analogRead(potpin); Lee el valor del potenciómetro (valor entre 0 y 1023)
Val = mapa (val, 0, 1023, 0, 179); la escala a utilizar con el servo (valor entre 0 y 180)
myservo1.Write(Val); ajusta la posición del servo según el valor de escala
Delay(15); espera a que el servo llegar
Val = mapa (val, 0, 1023, 0, 179);
myservo2.Write(Val);
Delay(15);
Val = mapa (val, 0, 1023, 0, 179);
myservo3.Write(Val);
Delay(15);
Val = mapa (val, 0, 1023, 0, 179);
myservo4.Write(Val);
Delay(15);
Val = mapa (val, 0, 1023, 0, 179);
myservo5.Write(Val);
Delay(15);
}




")



")




