Paso 9: Programación del regulador del Motor
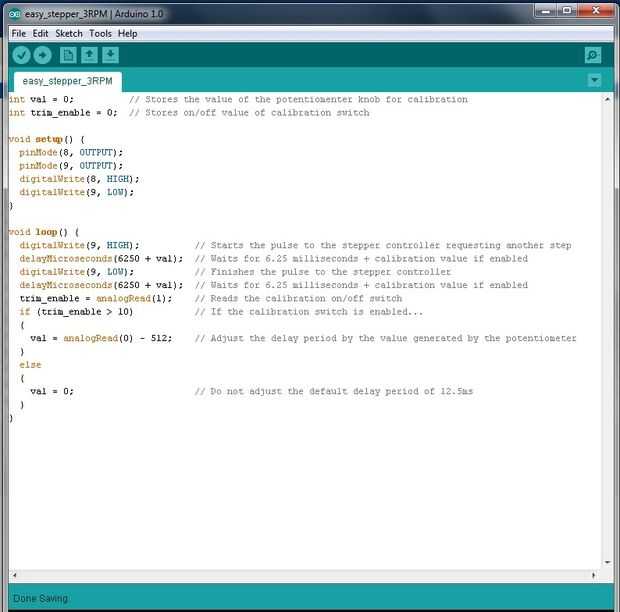
También decidió aplicar una perilla de calibración para hacer ajustes de un ajuste fino a la velocidad de rotación, en caso de que esto era necesario. El código para el Arduino es muy sencillo:
===================================================================
int val = 0; Almacena el valor de la perilla potentiomenter para la calibración
int trim_enable = 0; Tiendas encendido valor de interruptor de calibración
void setup() {}
pinMode (8, salida);
pinMode (9, salida);
digitalWrite (8, HIGH);
digitalWrite (9, bajo);
}
void loop() {}
digitalWrite (9, alto); Comienza el pulso al controlador paso a paso solicitar otro paso
delayMicroseconds(6250 + val); Espera 6,25 milisegundos + valor de calibración si activado
digitalWrite (9, bajo); Termina el pulso al controlador paso a paso
delayMicroseconds(6250 + val); Espera 6,25 milisegundos + valor de calibración si activado
trim_enable = analogRead(1); Lee la calibración interruptor on/off
Si (trim_enable > 10) / / si se activa el interruptor de calibración...
{
Val = analogRead(0) - 512; El valor generado por el potenciómetro para ajustar el período de retardo
}
otra cosa
{
Val = 0; No ajustar el período de retardo por defecto de 12.5ms
}
}
===================================================================











")
")
