Paso 4: Instalación del Software.

He flasheado mi Naze32 con Betaflight como se describe aquí. Usted puede elegir uso regular Cleanflight firmware (o incluso Baseflight lol). Ahora voy a describir la configuración que he cambiado, por menú (con fotos):
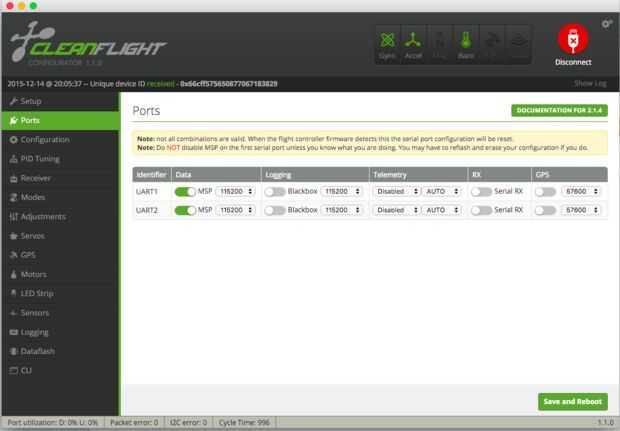
- Puertos: Permiten MSP para UART 2. Esto es lo que vamos a utilizar para transmitir datos RSSI para el menú en pantalla, así como para permitir la comunicación entre el OSD y Naze32 para cambiar la configuración en el menú OSD (más sobre esto más adelante) y tensión.
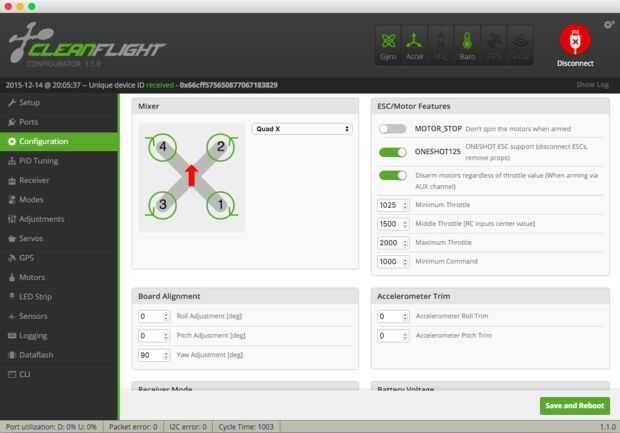
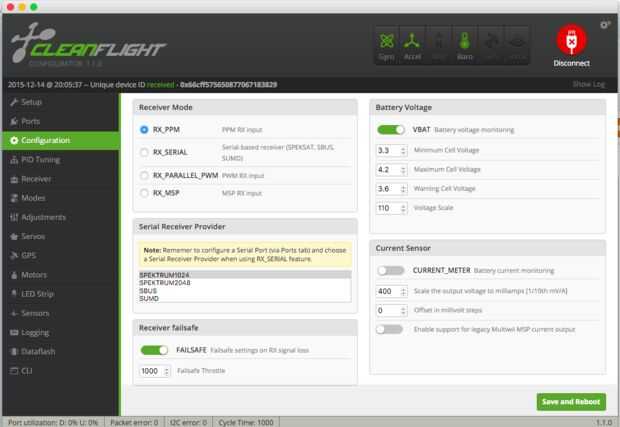
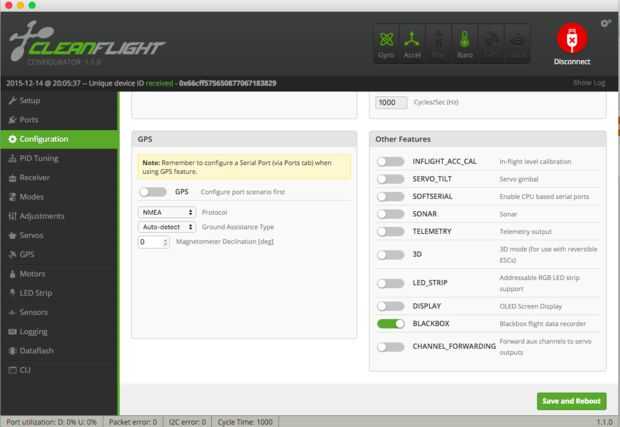
- Configuración: Activar ONESHOT125 (un protocolo de comunicación más rápido entre el NE y los CES). Configurar aceleración máxima a 200 y aceleración mínima para 2000. Cuando MOTOR_STOP está desactivado, sus motores comenzará a girar a velocidad mínima tan pronto como usted del brazo por lo que tendrá que disminuir si tu quad intenta levantar tan pronto como usted del brazo. Yo estoy Armando por un interruptor (canal AUX) por lo que también he seleccionado "Desactivar independientemente del valor de la aceleración". Ajuste del desvío se encuentra a 90 como he cambiado la orientación de la Naze32 a mi AP (puntos de la flecha debe apuntar hacia adelante a la derecha). RX_PPM es seleccionado como mi salida del receptor es PPM (modulación por posición impulsos, que me permite transmitir 8 canales en un cable de señal) en lugar de PWM (pulso modulación de anchura de que requiere un cable por el canal). También se habilitan VBAT y a prueba de fallos. Mariposa a prueba de fallos se encuentra a 1000 para el quad bajará del cielo, si se pierde la señal (importante: también tienes failsafe en el receptor para el FC sabe cuando se pierde la señal. Leer manual de instrucciones y documentos de Cleanflight el receptor). Registro de datos de Blackbox está habilitado como la rev.6 de Naze32 viene con memoria flash integrada de 2MB.
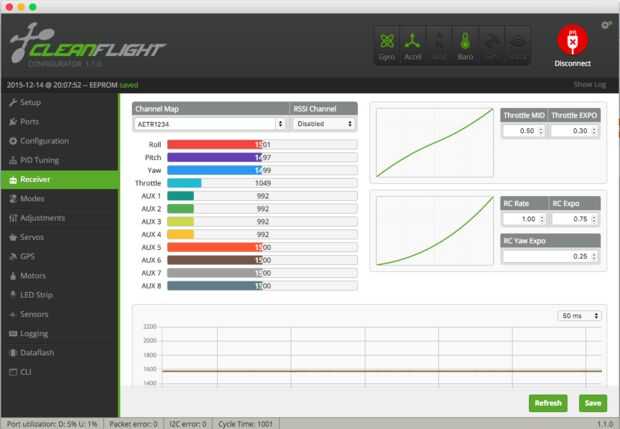
- Sintonización del PID: Quad vuela decentemente en la acción PID (regulador de PID Luxfloat. No he probado reescritura) pero he reducido un poco, noté cierta oscilación en Blackbox. Mi quad no está todavía plenamente sintonizado y voy a publicar un paso diferente para eso. También he puesto las tarifas muy altas. 0.45 me permite hacer rollos doble bastante snappily. 0.1-0.3 es buenas tasas para comenzar.
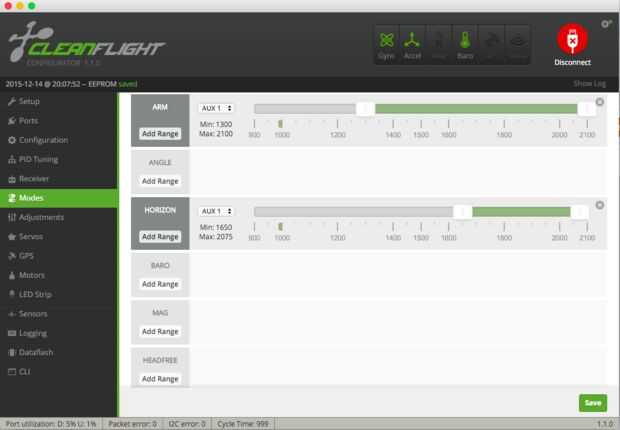
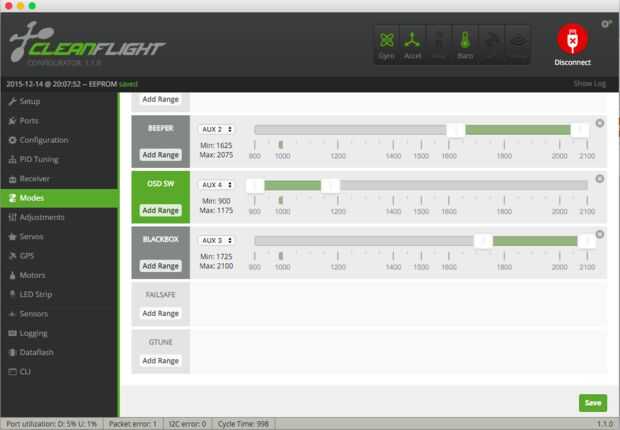
- Modos: estoy usando un interruptor de 3 posiciones en mi radio para modos de armado y vuelo. Se desarma la posición superior, el medio es el modo de acro (sin estabilización) y la parte inferior es horizonte (auto nivelación pero puede hacer flips y rollos en los límites de cada palo). Esto me permite desarmar fácilmente o cambiar al horizonte si asuste. La alarma se establece a un switch diferente (para encontrar el quad si derribado). Otro interruptor se utiliza para habilitar el registro de blackbox y un final uno se utiliza para desactivar el OSD si quiero.
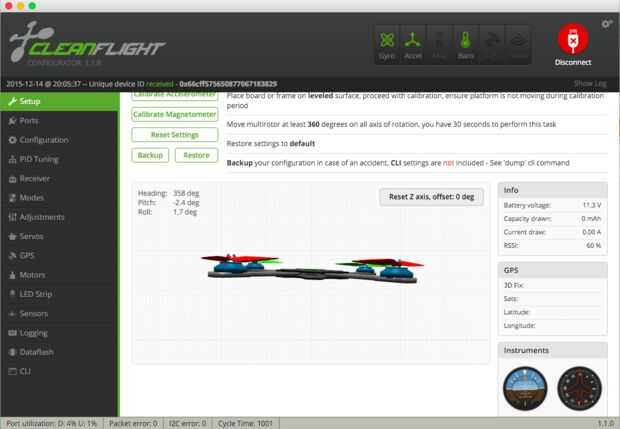
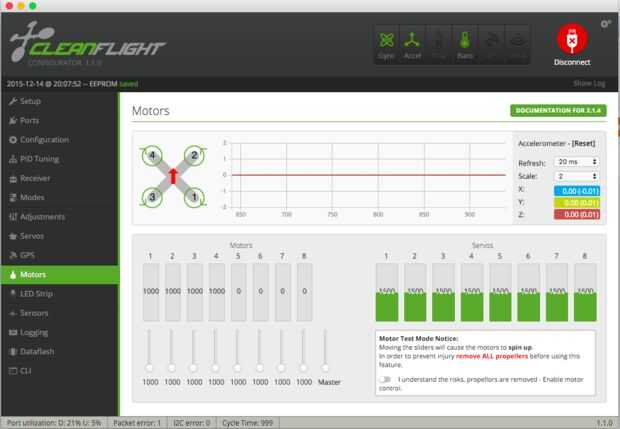
- Motores: Esto es muy importante. Tendrá que calibrar sus CES de esta ficha. Para ello, primero hacen que los apoyos se quitan! Encender la naze32 por USB, conectar, compruebe el interruptor en esta ficha y mueva el regulador principal al completo. Encienda el quadcopter con la batería. Debe oír una secuencia de pitidos que significa que el CES han reconocido el acelerador a fondo. A continuación, mueva el control deslizante al mínimo. Usted debe oír otra secuencia de pitidos. Energía y otra vez y comprobar que los motores todo marcha al mismo tiempo y hacer girar para arriba muy bien (esto se puede ajustar en BLHeliSuite si es necesario). Ahora regresa a la pestaña de configuración y establece el mínimo de la válvula reguladora en el valor más bajo que los motores girando a confiablemente (debe ver este valor en la ficha de motores en el regulador principal). Mina fue 1025.
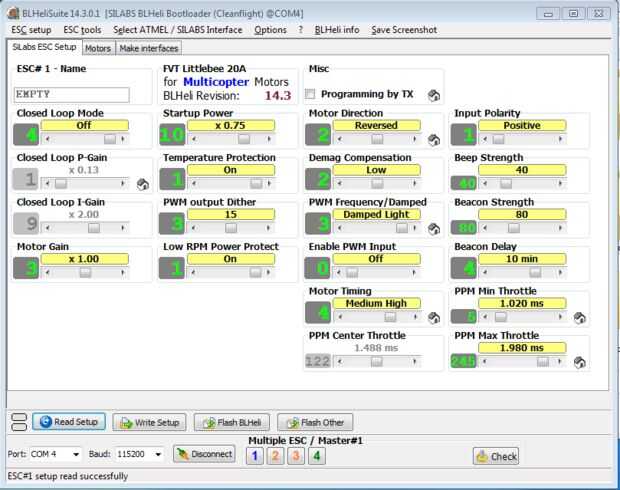
Ahora es el momento para establecer el CES con BLHeli. Una cosa buena es que ahora usted puede utilizar el controlador de vuelo como un adaptador para BLHeli. Hay un montón de vídeos en YouTube que muestra cómo programar el CES con su Naze32. He flasheado el CES con la última versión de BLHeli - 14.3 (probablemente debería hacer esto antes de calibrar o tendrá que rehacer la calibración). Tuve un poco de un momento de miedo cuando intenté intermitente firmware sin la principal batería conectada y el flash no se pudo. Yo ya no era capaz de comunicarse con la ESC pero por suerte pude salvar con mi Arduino nano y las almohadillas de comunicación C2 en la ESC.
Compruebe que los valores de PPM Max y Min de la calibración están cercanos (decidí ponerlos todos a los mismos valores.) Aumentó el momento Motor a medio alto y me permitió luz amortiguada (frenado activo). Puse "Activar entrada PWM" en off para que el CES no se debe confundir la señal de un disparo de PWM normal. Yo también "programación por Tx" para asegurar que los ajustes no se cambian accidentalmente. Motores 1 y 4 se invierten como fueron girando al revés para mí.












