Paso 2: Construcción de las piernas
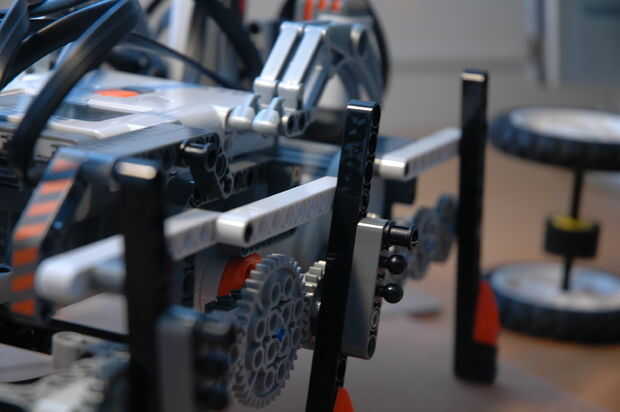
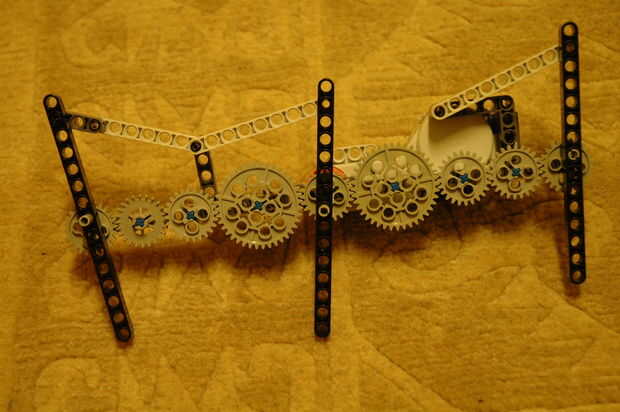
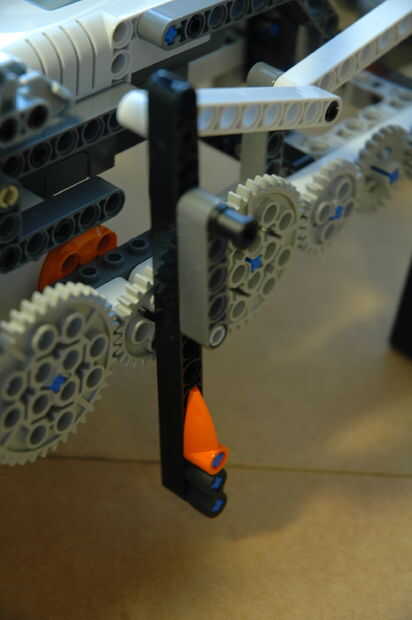
Para dirigir, paramos el motor de un lado, para que solamente un lado del robot es a pie, haciendo que el robot gire. El robot camina en forma de trípode. Cada equipo levanta las piernas arriba y abajo y al mismo tiempo hacia delante y hacia atrás, haciendo que el robot a caminar.
No hay diferencias entre los mecanismos de dos piernas (aparte que uno se refleja en el otro).










")


