Paso 8: Conectar todo
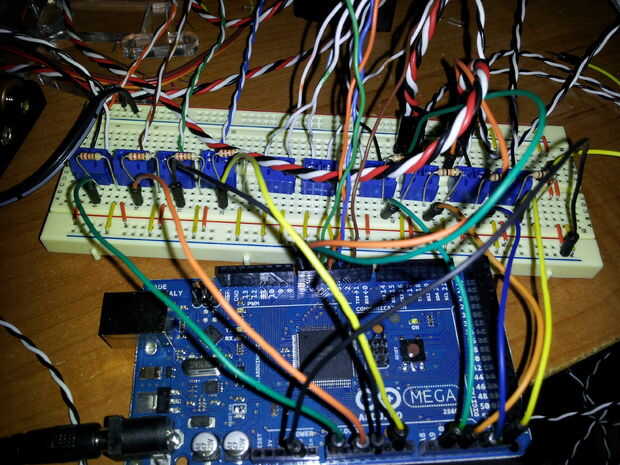
Cada sensor tiene su propia terminal. Un cable va en una ranura, y el otro cable va en la otra ranura. Puesto que los sensores son resistencias, la dirección van en no importa.
Que va de izquierda a derecha en los terminales:
(cada resistencia con su propia terminal)
Resistors(glove) - índice de flexión
dedo medio
dedo anular
Pinky
(cada uno de los cuatro cables va en su propia ranura)
Terrenos-orden motor no importa; Recuerde que los cables positivo gancho directamente en Arduino
FSRs(robotic hand) - Índice
dedo medio
dedo anular
Pinky
Los servos se enganchan para arriba en el otro lado de la protoboard.
Pernos del servo:
Fuente de alimentación rojo-positivo
Negro-tierra
Blanco/amarillo-señal (Digital clavija de salida del servo se une a en el Arduino)
Todos los cables de puente van del tablero a los pines correspondientes en el Arduino. (flex sensor 1 Analog in 0, flex 2 como un sensor análogo en 2, etc.).

")







 (impresión 3D)")



