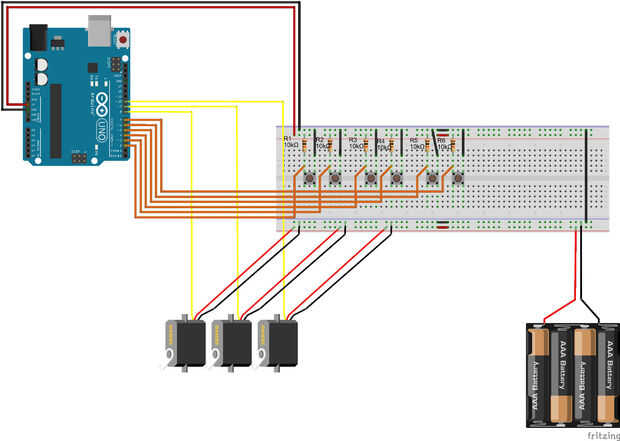
En este proyecto me puse la tarea de controlar el movimiento de 3 motores servo pulsando interruptores de botón. Mi intención es usar estos botones para controlar el movimiento de un brazo robot servo de tres.
Qué queremos que pase:
1. quiero controlar un servo con un par de botones, uno que gire hacia la derecha, para girar en sentido antihorario
2. Si pulse y mantenga pulsado un botón, un motor cinemático se moverá hacia la derecha hasta llegar a su límite máximo.
3. Si Presione y mantenga presionado el botón, un motor cinemático se moverá hacia la izquierda hasta llegar a su límite máximo.
3. Si pulse un botón y soltarlo, un motor cinemático moverá una cantidad fija en una dirección determinada.
4. cuando encienda primero el Arduino, el servo restablecerá su posición en el centro de su arco de movimiento
Cosas que tenía que ser cuidado con:
1. tratar de forzar el motor servo para seguir moviéndose en una dirección, después de que ha llegado a su límite máximo, puede dañarlo.
2. colocar muchos servos a línea de alimentación de 5v de Arduino puede dañar los componentes en el Ardiuno, así que necesito para alimentar los servos desde el exterior.
3. conseguir atado para arriba con todos los cables! Necesito ser capaz de extender su longitud para aumentar la flexibilidad de posicionamiento y ordenar los cables alejados de los botones.



")








