Paso 2: El circuito
![]()
![]()
![]()
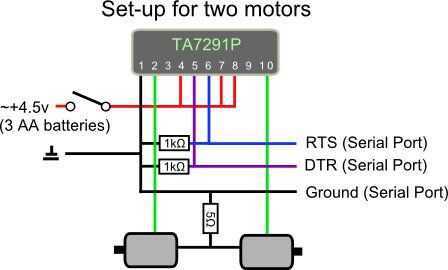
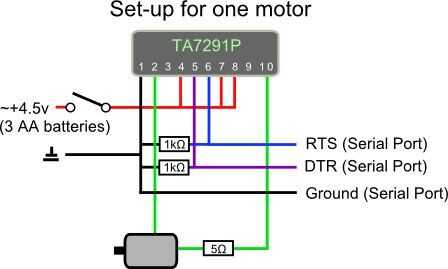
a continuación necesitamos hacer el circuito. Es una conexión de puente de motor simple. El único problema es que TA7291P necesita 4.5v para operar, pero los motores son de 3v. Hay dos formas de solucionarlo: obtener motores de mayor tensión o poner en un resistor para limitar la corriente. La resistencia tendría que ser de 2 - 5Ω con alta potencia (2w o más). Sin embargo Si compraste resistencias de 1/4 watt a granel (como hice yo) puede puede poner bastante en paralelo para dividir esa potencia ya que ocho resistencias de 1/4 watt pueden tomar 2w. Desde resistencias en paralelo dividen su resistencia, resistencias de 20 en 100Ω = 5Ω (como 10 resistencias en 50Ω). Eso es un montón de resistencias, pero en unos $0,02 cada uno, que comprar una resistencia de 2w extra. Puedes ver mi racimo de resistencia 100Ω en la foto. No necesita el interruptor que he puesto en el circuito, pero a veces las clavijas de la serie se fijan a alto cuando el USB se enciende que hará que tu motor rev antes de que su programa puede poner en marcha y los apaga.
Con solamente un puente de motor, para ir hacia adelante el robot debe 'waddle' con cada motor se enciende para unos ms antes de que el otro se enciende. También podría conseguir otro cable de USB a serie y establecer otro puente motor para mejor control del avance y del poder.













 para controlar un motor")
![Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]](https://foto.askix.com/thumb/170x110/5/87/587864a8efe29028e8562de52b3ccc03.jpg "Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]")