







Después de leer este artículo:
http://www.et.BYU.edu/~bmazzeo/LTR/Tech.phtml
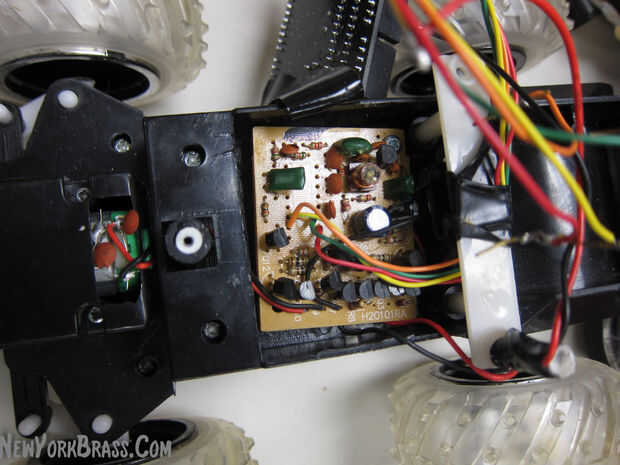
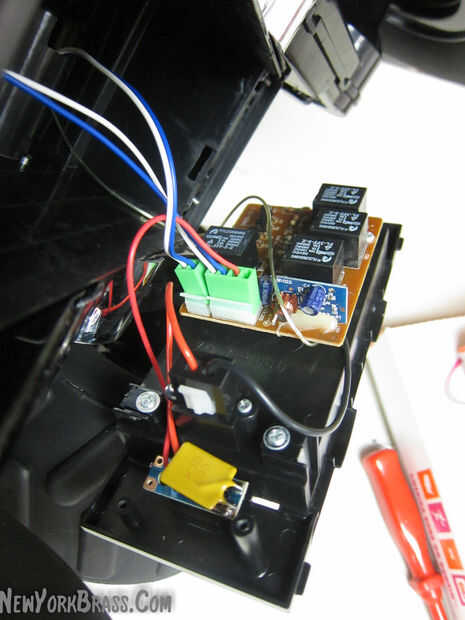
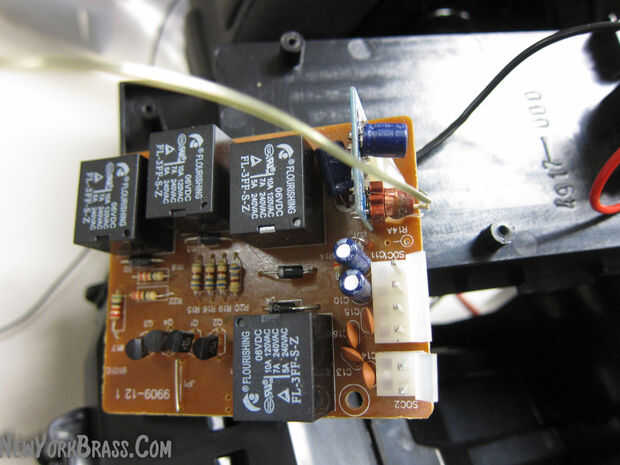
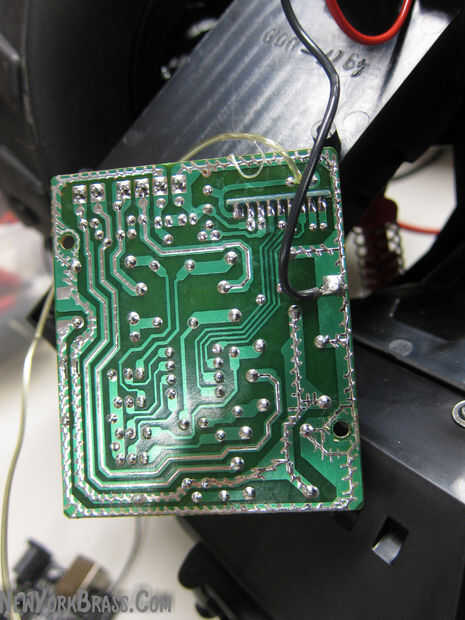
De repente se me ocurrió que casi cualquier coche de juguete RC podría estar utilizando este o similar arquitectura. Abrí 4 coches RC que fueron donados al proyecto y de hecho todos usan más o menos la misma configuración: todos estos autos tienen 2 puentes de H en un tablero pequeño montado en el interior. Casi todos los coches hoy en día utilizan una variación en el RX2C juguete coche chip (enlace) (es decir, clavijas 6,7,10,11 son los drivers para el puente de H) y estas juntas pueden aceptar niveles de tensión lógica independientemente de la tensión de la batería. Las tablas que no usan el chip tendrá generalmente una placa hija equivalente que llene la misma función. Por otra parte-las juntas están optimizadas para los motores de los coches de forma óptima. Contrario el artículo son seguros para girar en ambos lados del puente H al mismo tiempo por error - todo lo que hacen es encender el modo de frenado.
Casi todos los coches de RC son configura de manera que las ruedas traseras corren de potencia puente H para el movimiento de avance/retroceso y un puente de H se utiliza para ejecutar un servo o servo-como mecanismo en la rueda delantera. Existe otra configuración en la que la derecha dos ruedas están conectadas a un motor y las dos ruedas izquierdas conectadas a otra y esta configuración pueden hacer algunos trucos interesantes como encender el lugares y otros trucos.
El chip especifica una salida adicional - "modo turbo" pero estoy todavía a ver un coche con esta función implementada.
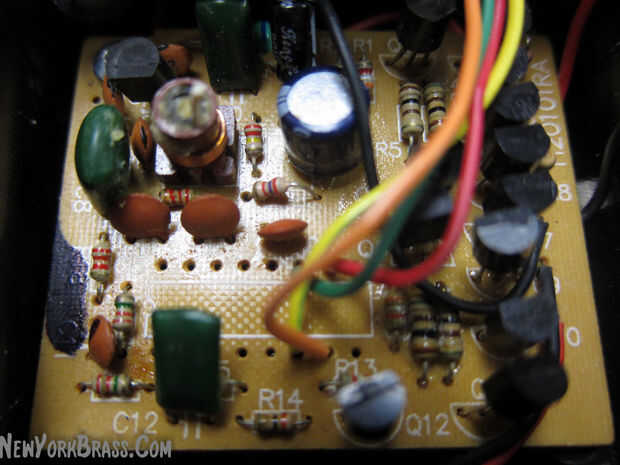
Si abrir el coche y no encuentra la configuración estándar - no desesperes - averiguar las entradas del puente H es fácil - y generalmente están conectados los pines con resistencia de 2,2 k.
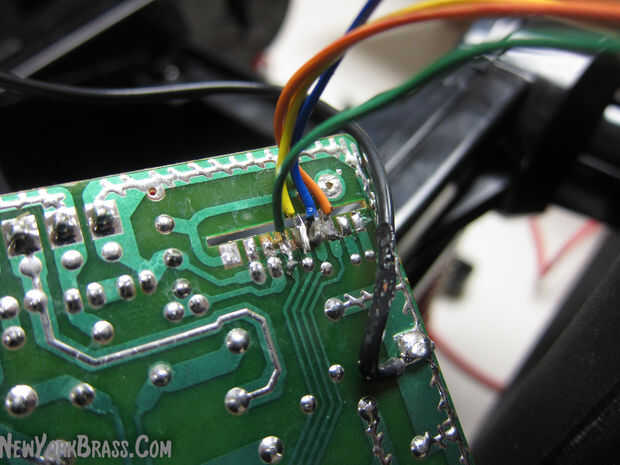
Los pasos necesarios para hacer este trabajo:
1) quitar el chip RC - más sobre esto más adelante.
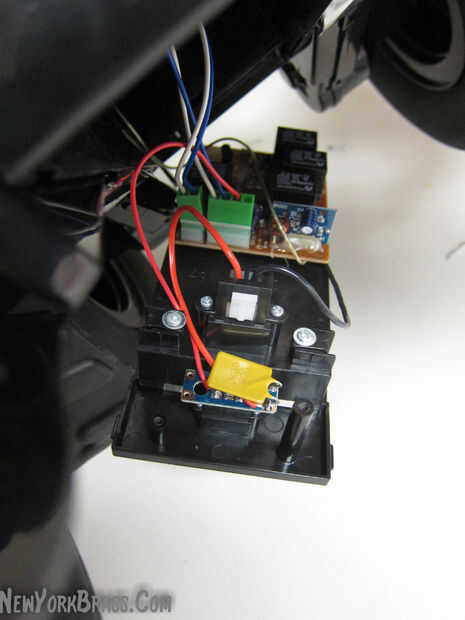
2) soldar 4 cables a los terminales del puente H
3) soldar un cable al borne negativo de la batería - para alimentar el arduino
4) soldar un cable al lado positivo del interruptor - para alimentar el arduino...
Aquí hay un video de este mod, después completamos el mod en 25 minutos.
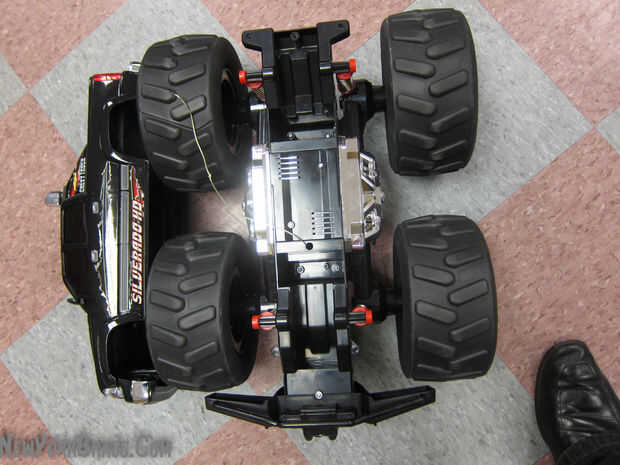
Una vez montado, puede controlar el coche desde el arduino - y viola! usted tiene un coche robótico!
Tras hacer unos coches - me parece que el proceso de conversión de un coche tarda aproximadamente 30-40 minutes.s un
Tenga en cuenta que los coches son sensores!
VARIANTES:
* RX2C microchip basado en controlador/receptor
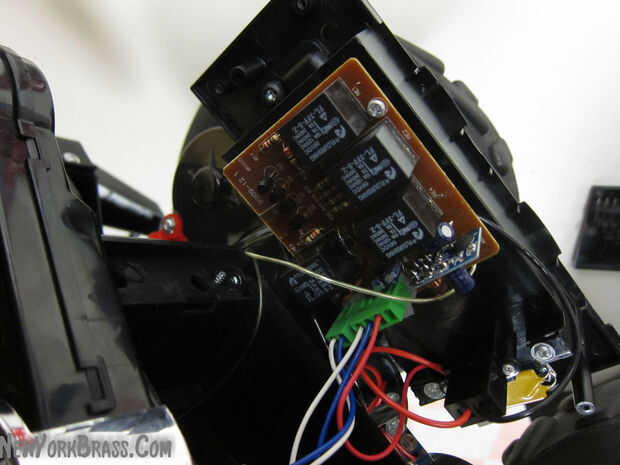
* Hija bvoard basado en controlador/receptor
* Analog (transistor base) puente H - puede utilizarse con analogWrite y PWM para controlar la potencia
* Relais basado en puente H para los dispositivos más grandes. Esto puede girarse solamente encendido y apagado - si usted quiere usar PWM en allí - usted tendrá que recurrir a un diseño personalizado de puente H y la Junta Directiva de la zanja.
Nota: Este mod cancela la funcionalidad RC. He tenido pensado hackear la RC parte para permitir que dos arduinos (o más) para comunicarse a través de hacking el transmisor y luego conectar el (desconectado) señales de líneas como una entrada de arduino. así uno mataría unos pájaros en un movimiento: un doble puente H, vehículo robótica y half duplex comunicaciones RC entre arduinos. tal vez lo haré igual esto en el futuro :)
ADVERTENCIA: Asegúrese de que el interruptor esté apagado mientras su vehículo cargado de programación- o tienes un misil robótico volando fuera de la mesa a máxima velocidad y potencia. También puedes esperar un débil movimiento de las ruedas por el puente de H, siendo accionado por el cable USB - incluso cuando el interruptor está apagado.
Aquí hay un video de los niños sus propios coches de la programación por sí mismos y también nota que los coches son sensorlesss

.")
 cualquier archivo multimedia a (casi) cualquier otro archivo multimedia gratis!")










")