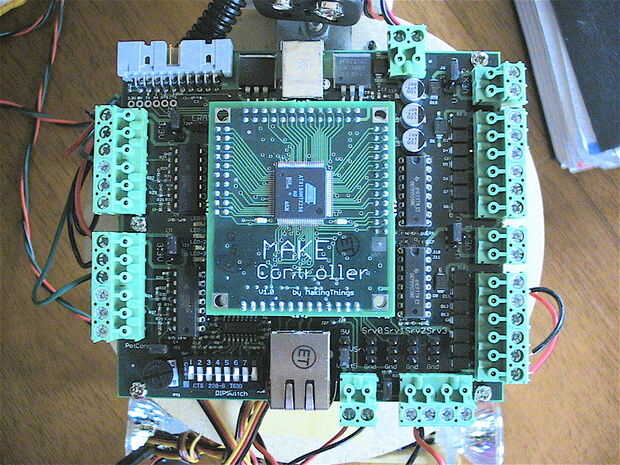
Paso 5: Configurar el controlador / conexión de sensores y servos

http://www.makingthings.com/resources/tutorials/Getting-Started/index_html/Introduction
Esto se hace conectando el controlador a un ordenador con un cable USB, descarga el archivo Heavy.bin y la aplicación de mchelper y uso mchelper para cargar el firmware pesados al controlador - tarda solamente un par de minutos para cargar el firmware y asegúrese de que el regulador está funcionando correctamente.
Ahora desconecte el controlador del ordenador. Hay algunas cosas que necesitan ser configurados en el tablero de regulador y conecte el flex sensores y servos y habilitar el modo POLY.
En primer lugar, tienes que fije los conmutadores DIP en el tablero (hay ocho de ellos) para poner el controlador en el modo POLY y activar el programa seguidor. Esto se hace colocando interruptores de 1, 3, 6 y 8 en posición ON. 3 activa el modo de seguidor de la primera serie de entradas analógicas y 6 activa el segundo conjunto de entradas analógicas. Hay más información sobre las funciones de modo poli aquí:
http://www.makingthings.com/resources/tutorials/Poly-Functions/index_html/Introduction
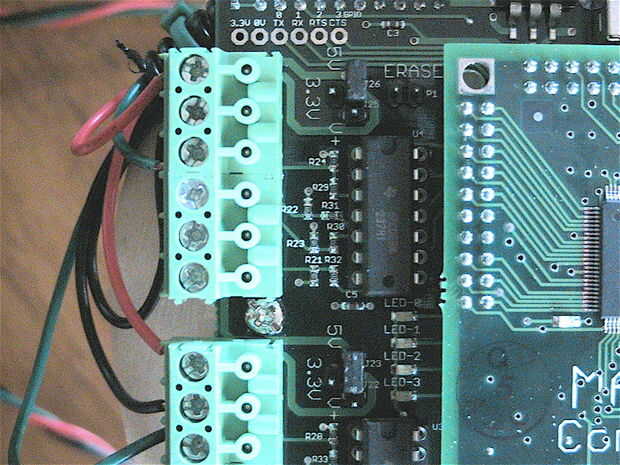
Ahora hay que configurar la potencia de entrada analógica a 5v (el valor predeterminado es 3, 3V), esto es necesario por los sensores de flexión. Esto se hace moviendo un par de puentes en el tablero de control situado en cada una de las entradas analógicas.
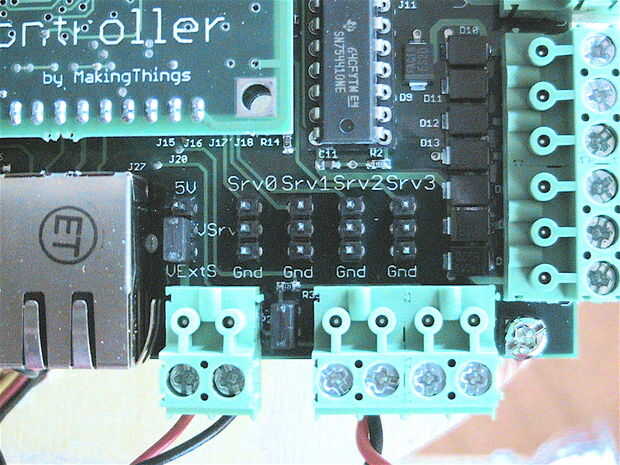
Los servos son impulsados por sus propios 4.8v batería. Esto es porque he encontrado que cuando los servos directamente en la tarjeta controladora tuvieron algunos problemillas debido al ruido eléctrico que generan. Para alimentar los servos de una batería que necesita para colocar el puente situado cerca de las salidas de servo para que sea más cercano a la etiqueta VExtS en el tablero y conectar los cables de corriente al conector de alimentación exterior de servo. Los servos están conectados a las salidas de servo en el tablero marcado 0 y 2, prestando atención a la dirección que se enfrenta al alambre de tierra del servo. Tenga en cuenta que los servos que giran la cabeza y mover hacia izquierda/derecha están conectados juntos. Esto puede hacerse con un adaptador de cable "Y" o empalmando los cables del servo entre sí.
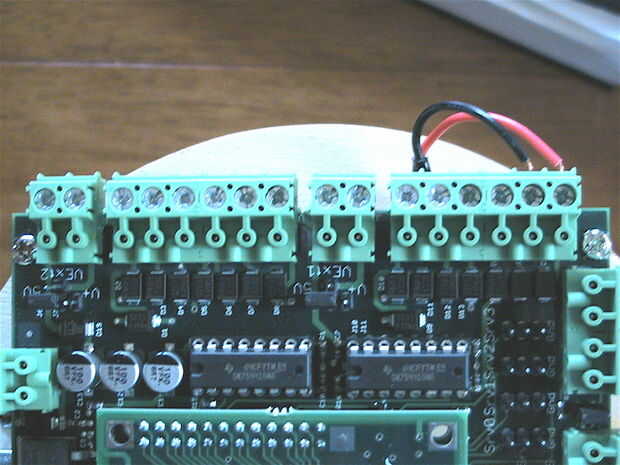
Las luces están conectadas a las salidas digitales de la Junta de controlador Gnd y VOut1. Por defecto de la tarjeta controladora es proporcionar 5v en Vout por lo no necesita ser cambiado.
Hay un desglose completo de las entradas y salidas de la tarjeta controladora aquí:
http://www.makingthings.com/resources/tutorials/Application-Board-Overview/index_html/Introduction
Ahora Conecte el 9.6V batería entrada principal del controlador. El controlador puede utilizar en cualquier lugar entre 6v y 12v pero se los recomiendo 9v como la Junta no tiene que trabajar tan duro convertir las tensiones para sus entradas y salidas.
Ahora Conecte los sensores de flexión. Conecte primero los cables Vin y Gnd. Ahora utilice un multímetro para probar su entrada desde el sensor flex. Toque el positivo del multímetro al cable de señal desde el sensor de flex y la negativa al contacto de tierra en el tablero de control. Cuando usted dobla el sensor de la tensión debe cambiar según cuánto se curva el sensor. La lectura de tensión no debe ir por encima de 3, 3V. Si todo está bien, conecte los cables de señal de los sensores de flexión a las entradas analógicas 0 y 4 (justo al lado de los cables de tierra.)
Eso es todo! Ahora cuando usted los sensores los servos deben moverse según cuánto y cuán rápido el sensor está doblado.






")




")

