Estoy trabajando en un pequeño robot que puede ser controlado por un Arduino usando comunicaciones inalámbricas. Pero fui por el número de cables desde el Arduino y protoboard. Así que decidí reducir el número de alambres por hacer mi propio tablero de regulador del motor. El resultado era prometedor, redujo el número de cables por la mitad.
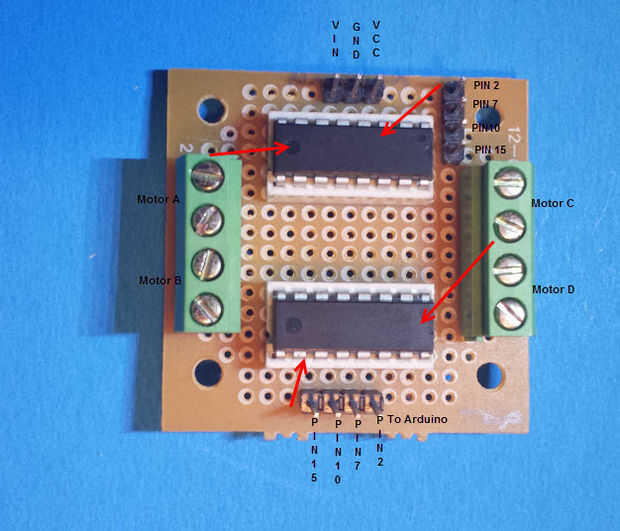
Quería controlar 4 motores DC pequeños, así que opté por el chip L293D. He utilizado dos de esos chips para controlar 4 motores, cada chip puede controlar 2 motores.
Voy a explicar en detalle cómo conectar dos fichas para ejecutar 4 motores de corriente continua.













