Paso 2: Permite entender cómo cablear un solo chip L293D

Las fotos son realizadas por mí con la ayuda de Firtzing y un editor de fotos.
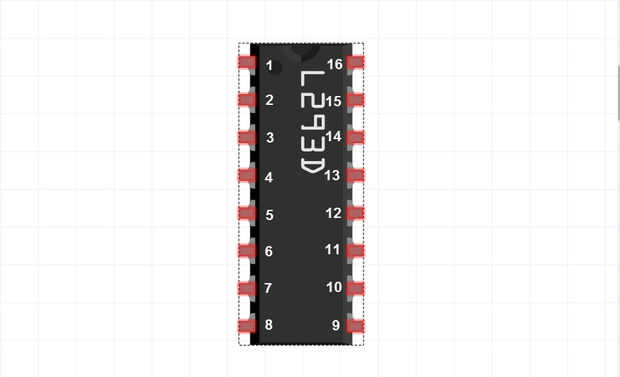
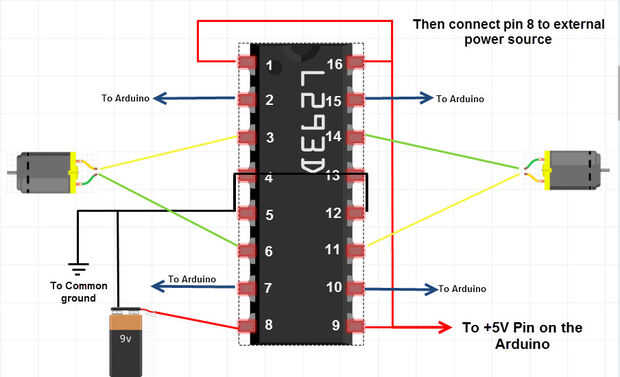
La primera imagen muestra cómo se numeran los pines del L293D.
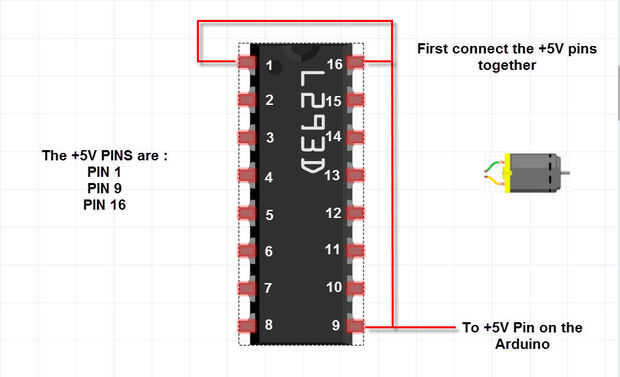
Comience conectando todos los bolos que necesitan 5V de Arduino, conectan los pines 1, 16 y 9 y luego conectarlos a los + 5V (Vcc) en el Arduino. (el cableado del cuadro 2 - roja)
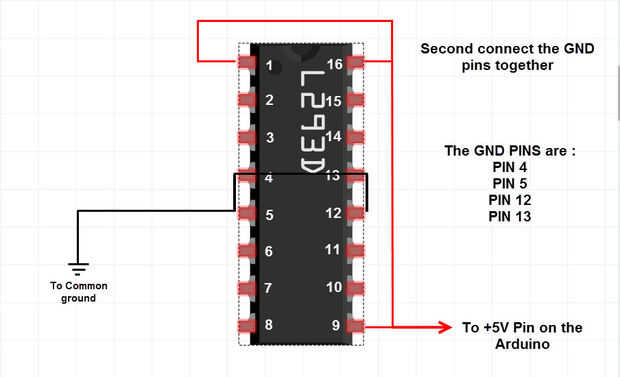
El siguiente paso es conectar los pines de tierra juntos. Conectan los pines 4, 5, 12 y 13 y luego conectar al pin GND de Arduino. (imagen 3, negro cableado)
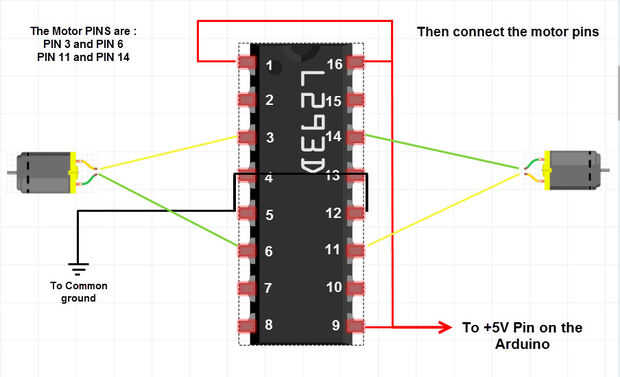
A continuación para conectar los pines del motor. Pines 3 y 6 controlan de un motor (motor A) y controlan de los pines 14 y 11 el segundo motor (motor B). (El cuadro 4)
Ahora conecta los pines 2 y 7 con los pernos digitales de Arduino, se utilizaban para enviar comandos al Motor A. Y los pines 10 y 15 también deben ser conectados a los pines digitales de Arduino para controlar Motor B. (Foto 5)
Lo que queda es para encender el chip. Para ello, conectar el pin 8 a la fuente de alimentación externa + ve fin,
También conocido como batería (en mi robot, utiliza 4 pilas AA = 6V), luego conecte el extremo - ve de la fuente de alimentación a la GND de Arduino (tierra común).













