Paso 1: Comandos de código de la muestra
· Vuelta (ángulo)
· Up()
· Down()
Ir (x):x es un entero que especifica el número de pasos debe seguir el robot. Como los codificadores de rueda cambian estado 8 veces (4 alta y 4 baja) por la revolución de la rueda cada paso es igual a 1/8 de la circunferencia de la rueda. Esto es igual a aproximadamente 15,7 mm.
La variable charsize se utiliza como un multiplicador y por defecto tiene un valor de 1. Si se cambia por ejemplo así que charsize = 3 entonces el mensaje de imagen será mayor de 3 veces y cada paso será aproximadamente 47,1 mm.
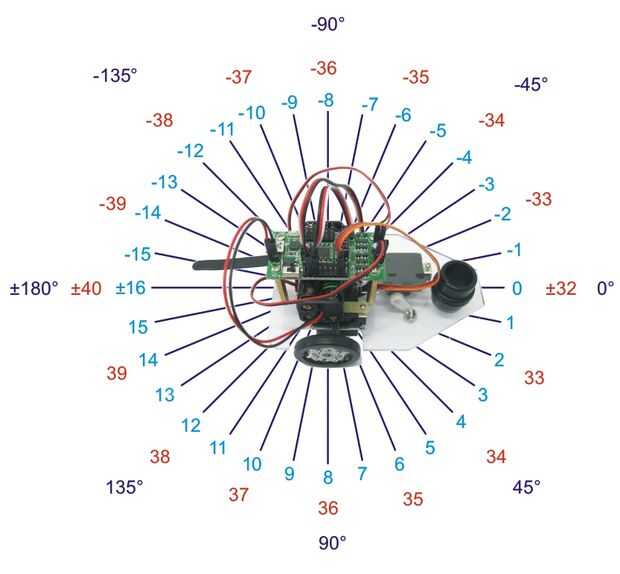
Vuelta (ángulo): el ángulo es un entero que especifica el ángulo de giro. Todos los valores positivos hacer que el robot gire hacia la derecha. Un valor negativo hará que el robot gire hacia la izquierda. Este comando es más complicado usar porque hay dos maneras diferentes, que puede girar el robot.
1 del método de torneado: El primer método para un motor y conduce el otro motor hacia delante o hacia atrás. Este método proporciona el mayor número de ángulos posibles, pero debido a que el robot gira alrededor de 1 rueda es más difícil alinear la pluma con su posición anterior.
Método 2 de torneado: El segundo método conduce un motor adelante y uno hacia atrás. Este método proporciona la mitad como muchos ángulos, pero debido a que el robot gira sobre el centro de las ruedas es más fácil alinear la pluma con su posición anterior.
El código de ejemplo utiliza el primer método para valores de ángulo de –31 a + 31. Esto hace que todos los ángulos posibles disponibles. Estos ángulos se muestran en azul.
Valores positivos o negativos de 32 a 40 hacer el robot activar usando el segundo método como se muestra en rojo.
Si nos fijamos en el código de ejemplo, verá que también puede introducir valores 45, 90,135,180, 225, 270, 315 y 360. El código convierte automáticamente estos valores a su valor equivalente usando el segundo método de rodaje.
El código de ejemplo automáticamente compensa por la pluma no está montada directamente entre las ruedas y recuerda si la pluma fue para arriba o abajo en el momento se está haciendo un giro.
Up(): Este comando genera la pluma.
Down(): Este comando reduce la pluma.
El código de ejemplo incluye una función Stop() sin embargo este comando no es necesario para el dibujo y sólo se utiliza en los comandos Turn(angle) y Go(x) para asegurar la precisión del codificador.
También hay una función End() que pone el robot en un bucle continuo donde no hace nada hasta que se pulsa el botón de reset. Esto puede utilizarse al final del texto o imagen para parar el robot repita la función loop().









")



