Paso 1: Identificar los conectores de la pantalla de tela
Escudo de tela no es un PCB ordinario. También sirve como un chasis del robot. Hay agujeros en las cuatro esquinas específicamente diseñadas para los motores que utilizan tornillos.
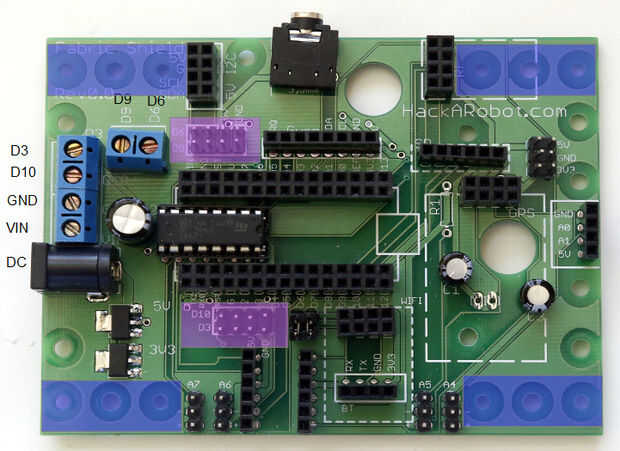
Cuatro pines digitales (D3, D6, D9 y D10) en Arduino Nano podrían utilizarse para el control de motores. Ya que motores lleva mucha corriente, un chip controlador de motor (L293D) se aplica en protector de la tela para proporcionar mucho mayor capacidad de corriente. Los motores podrían conectarse a cualquiera de los dos los pernos de cabecera (resaltados en morado) o a los terminales de tornillo. Voltaje de entrada (VIN) debe coincidir con la clasificación de los motores, pero también debe ser de 5V y arriba. En otras palabras, si utilizas motores de la C.C. 6V, VIN necesita conectarse a 6V.




")



 con Arduino y Android(bluetooth)")




")