Paso 6: Cómo controlar ESC con arduino
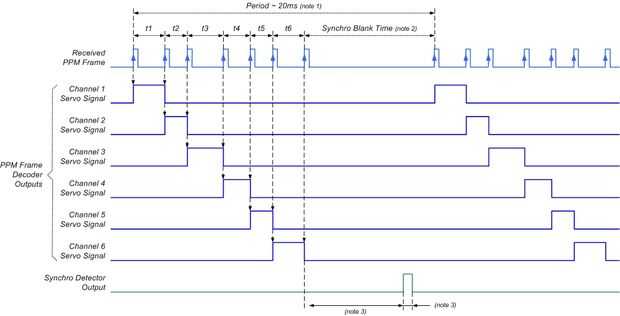
Básicamente ESC están diseñados para trabajar con controladores remotos usando el protocolo PPM. Protocolo de PPM es una onda de pwm a la frecuencia de 50hz.
Cambiando el ciclo de trabajo de esta onda de Pwm, se consiguen diferentes velocidades y direcciones.
Hay un cuadro a continuación para hacer comprender el funcionamiento de PPM.
Arduino puede generar señales de servo con la función servo.
Esta función ajusta el ángulo del servo con valores de 0 a 180
Esta información de ángulo interpretada en ESC como:
Degree 0............90.............180
Velocidad -% 100 %0 ... + 100% (- y + indica la dirección del motor)













