Paso 7: Hacer receptor y montaje de todas las materias en el fuselaje








He añadido algunas fotos que te ayudarán si estás confundido con cualquier paso.
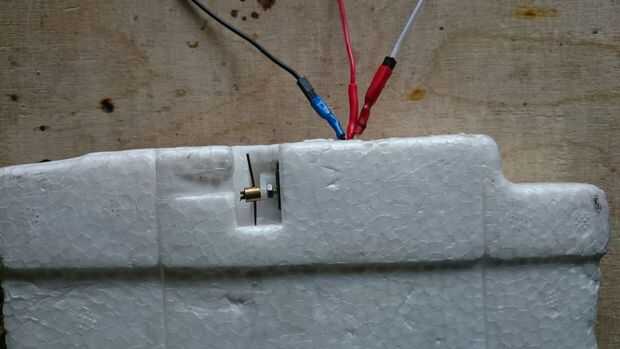
Soldar los cables de los servos en las alas
Tuve que soldar tres cables macho a hembra a cada servo y aislar los cables con encogimiento de calor pero que probablemente no tienes que hacer esto.
Acabado frontal
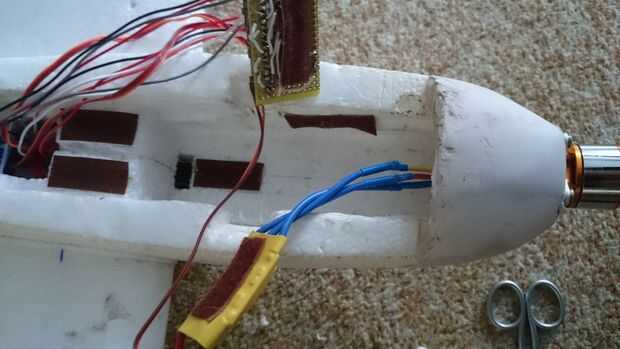
Frente del fuselaje como recordaran en el tercer paso tuve un agujero grande en lugar de un frente aerodinámico y agradable. Así que tuve que arreglarlo. Corte un bloque de espuma de poliestireno y después de media hora de trabajo que lo cambié en algo más aerodinámico. Había jodido mi motor con tornillos a la madera. Pero ahora sé que era una mala idea. Mientras que el primer intento del motor rompió libre así que había atornillado en la parte delantera del fuselaje algunos tornillos para espuma de poliestireno y cubre la parte delantera con la resina con fibra de vidrio. Es un poco pesado, pero también más sólido. Si compraste el fuselaje debe tener completa hermosa frente.
Montaje del motor
Hay tres posiciones posibles para el motor: en el frente, por encima del fuselaje y la cola (alas). Había montado en el frente, pero proceso similar es en cada posición. Debe tener un montaje con su motor. Atornillar el soporte al motor y luego montar con motor al frente que está en el eje longitudal (mirar la imagen en el paso 4). Hacer un agujero en la parte delantera (si no hay ningún agujero) para los cables, ponen el calor encoge y soldadura para los cables de salida (esta tres cables gruesos del mismo color). Compruebe si el motor se mueve en la dirección correcta, si no los cables lado del interruptor, ahora verifique otra vez (solo). Si todo es correcto se reduce el calor. Ahora están aislados los cables desde el motor y el avión está casi listo para volar.
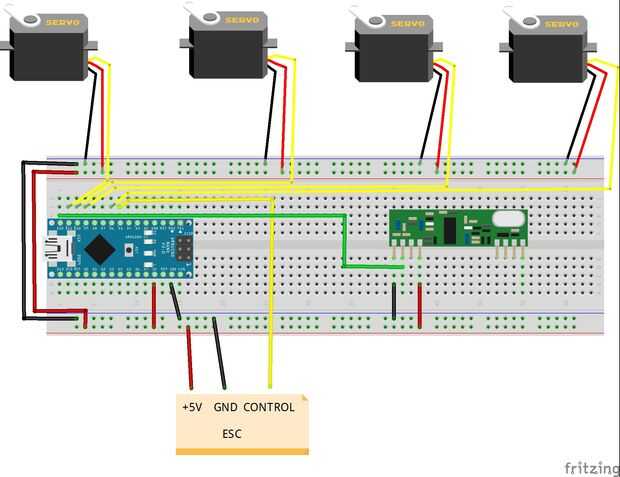
Hacer la tarjeta receptora
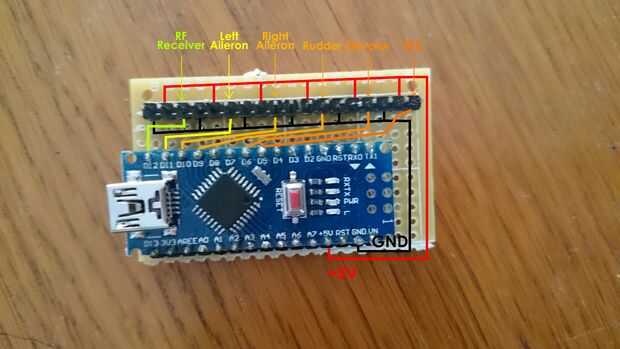
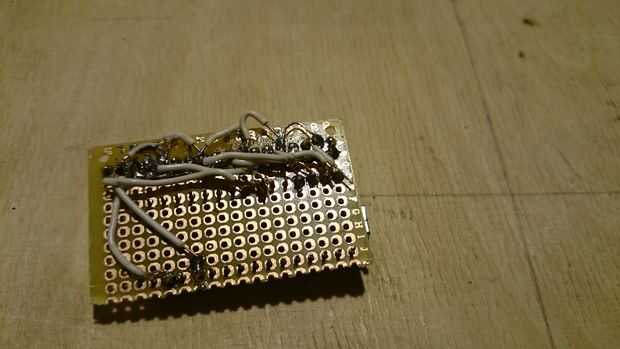
Ahora haz un Arduino, tablero del PWB con los agujeros y 18 pines. Tienes que hacer la tarjeta receptora. Vistazo a la sexta imagen. Hay un circuito del diagrama y en la imagen 7 se muestran los caminos en el tablero que se puede hacer con los cables y soldadura. En la imagen 9 se puede ver cómo mis caminos. No son tan bonitos, pero funciona. Comprobar con un multímetro digital si cada pin se conecta con el conector apropiado en el Arduino y si no hay ningún cortocircuito.
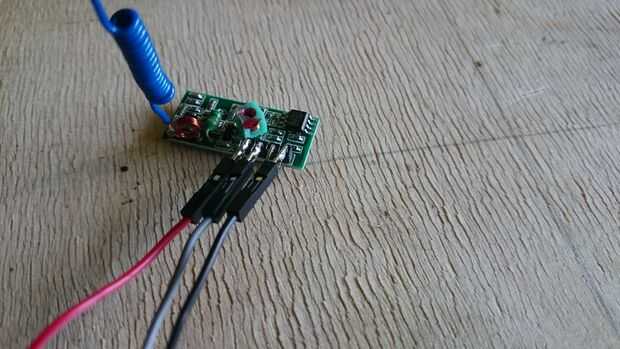
Si usted ha hecho la Junta para Arduino tres cables macho a hembra para el receptor de RF de la soldadura como se muestra en la imagen 10.
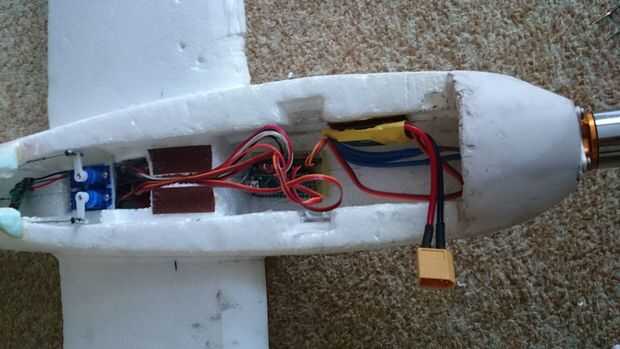
Sujetadores de gancho y bucle
Usted necesita fijar usando placa de Arduino los sujetadores del gancho y bucle, ESC y la batería (mirar las imágenes 11 y 12). Tuve que sujetar la ESC en el lado del fuselaje y la placa de Arduino en el final de la primera parte del fuselaje (espero sabes lo que quiero decir :) usando una sola correa pero utilizar dos correas para la batería. Pegue los sujetadores de gancho y lazo para el fuselaje y otras piezas usando pegamento caliente.
Los cables y el techo
Monte el receptor de RF como lejos de la parte delantera del fuselaje como sea posible. Mueva sus cables debajo de los servos que controlan la cola de la placa Arduino. Hacer un pequeño receso en las Ardenas (entre los servos y la primera parte del fuselaje) para los cables de los servos y el receptor de RF. Si usted tiene (como yo) desconectables alas conectan ahora. Descargar el código para el receptor y enviar a Arduino en el tablero receptor (puede encontrar el código al final de este paso, también tienes que descargar la biblioteca VirtualWire que puedes encontrar al final de este paso). Conecte los cables a los pines de la derecha. También ahora usted puede sujetar la batería.
Lo último que necesita es un techo. Hice un techo muy sólido, pero si compraste el fuselaje el techo es con él.


 impresión 3D")







")
