Paso 7: Cómo hacer un protector de Servo

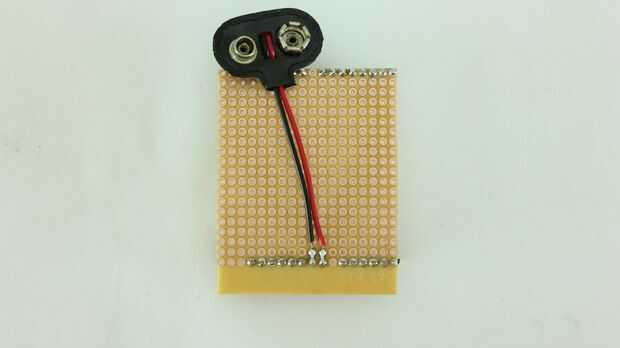
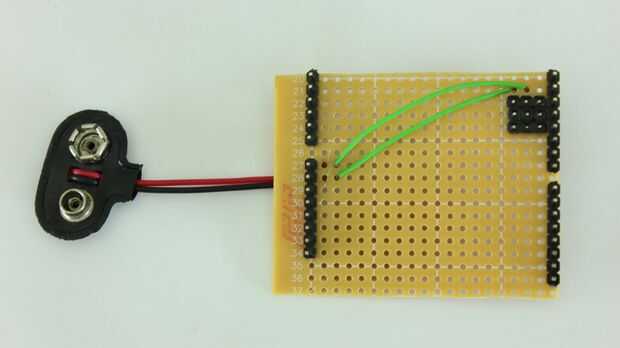
Para crear un escudo de servo, empezar otra vez con el escudo de proto básica. Para activar el escudo de proto en un protector de servo todos necesita añadir son algunos conectores del cabezal, algunos cables de puente y un conector de alimentación.
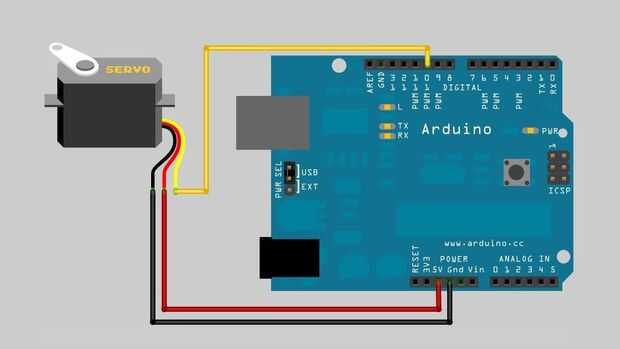
Para conducir un motor cinemático, necesitará conectar los cables según el siguiente código de color. El cable rojo está conectado a la tensión de alimentación positiva. El cable negro (o marrón) está conectado a tierra. El tercer cable será de color blanco, naranja, amarillo, azul o negro. Este es el cable de señal y está conectado a uno de los pines digitales.
Para servos de potencia baja, puede encender el motor directamente en el Arduino. Sin embargo, el Arduino sólo puede emitir un máximo de 200 mA. Así si quieres controlar varios servos, o si el motor requiere una gran cantidad de corriente, será necesario una fuente de energía externa como un paquete de baterías. Si el servo está preparada para funcionar a 6 voltios, entonces la solución más fácil es una batería de cuatro baterías AA. La batería tiene que estar conectado al pin Vin y el pin GND de Arduino. Esto permitirá que la batería alimentar el Arduino, así.
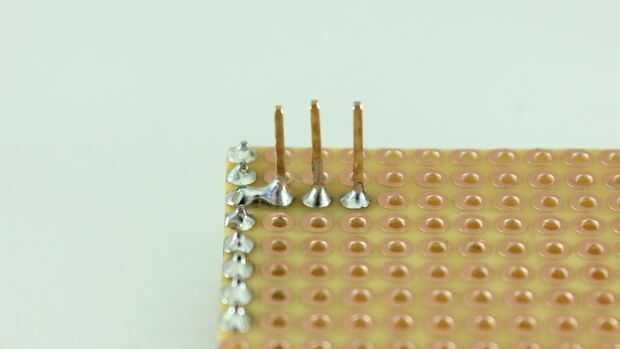
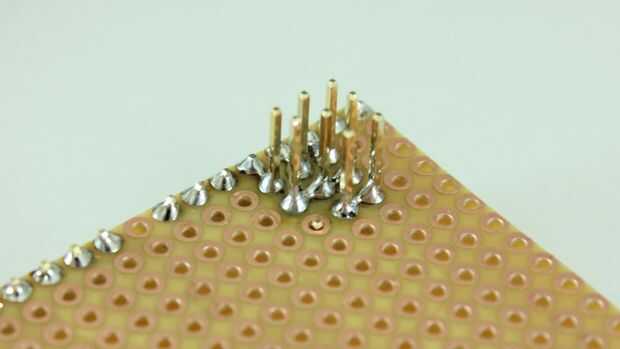
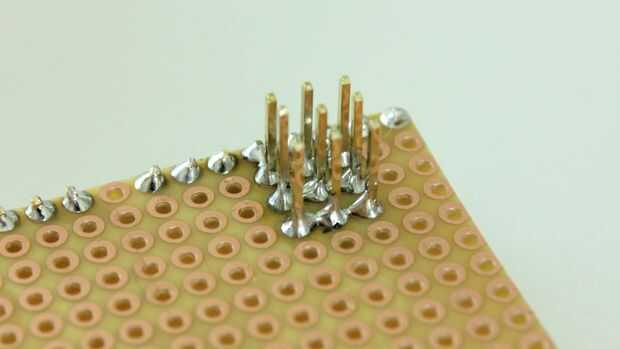
Ahora necesitamos añadir los pines de encabezado que se conectan al servo. Conecté tres sets de pins de encabezado a la tarjeta de circuitos justo debajo de los conectores para los pines digitales. Tomar el conjunto superior de los pernos y utilice un cordón de soldadura para conectar estos pines con los conectores digitales adyacentes. Corresponderá a la siguiente fila de pines el cable positivo o el conductor de tierra de los servos. Utilice cables de puente para conectar estos pines el pin Vin o el pin GND (lo que sea apropiado). Lo mismo para el tercer pin y conectar el pin Vin o el pin GND.
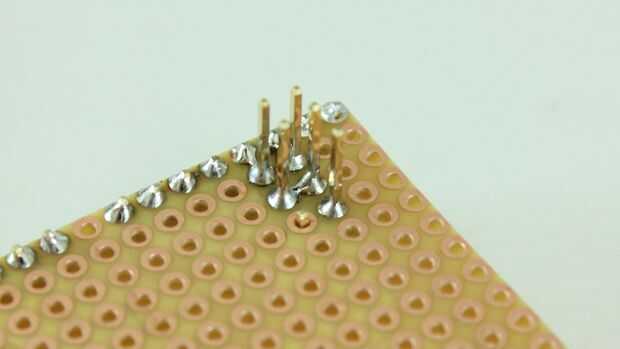
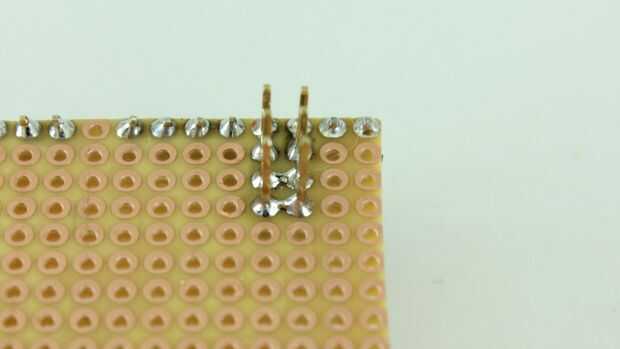
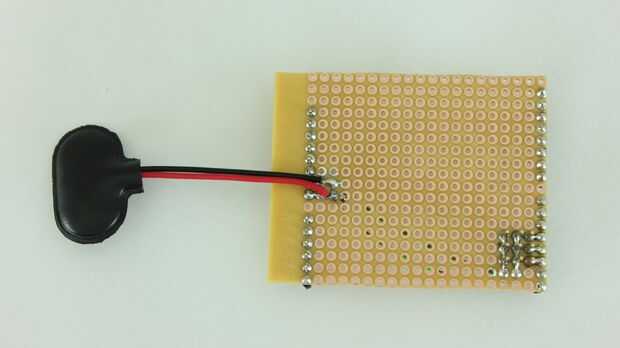
Cuando se trabaja con múltiples servos, se desea que los cables de servo positivo conectar y se desea que los cables de tierra a conectarse entre sí. Usted puede hacer esto por conectar los terminales adyacentes con un cordón de soldadura. Si le resulta demasiado difícil de utilizar el soldador entre los pasadores de encabezado, puede insertar los pasadores del extremo hacia abajo. Esto le dará más espacio al soldar los pernos de centro. Entonces usted puede empujar el perno hacia atrás hasta la altura original por lo que se puede soldar en su lugar.
Ahora puede enlazar sus servomotores. Con este diseño básico, se pueden controlar hasta 12 servos con un Arduino estándar.













