Paso 2: Cableado y configuración de Hardware


- Enchufar el soldador para calentarlo y luego línea de ESC con los cables de los motores (los cables de la salida tres de los mismo cables exactos deben tener por un lado, al otro lado es para la batería y el Arduino)
- Una vez que el soldador esté caliente poner los cables de control del motor saliendo de la ESC junto con los cables saliendo del motor. Los cables de mediados tienen que ir juntos, pero los cables de 2 laterales se pueden cambiar para invertir la dirección del motor. Por último, es necesario utilizar el soldador para calentarse los cables, esto debe tomar unos 5-10 segundos, luego derrita la soldadura de los alambres que los unen.
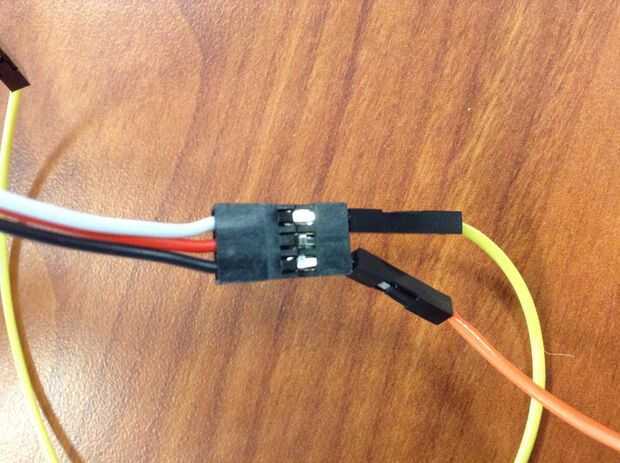
- Tome el cable de entrada de la esc (uno que parece un cable de servo) y conecte la tierra a tierra y la señal (blanco) al pin 9. El cable positivo debe conectarse a vin sólo si no está conectado el arduino al ordenador. Si está conectado al equipo, no conecte el cable positivo a nada o se quemará eres tu computadora
- Los gruesos cables rojo y negro saliendo de la parte inferior deben conectarse a la batería.


 con Arduino")









