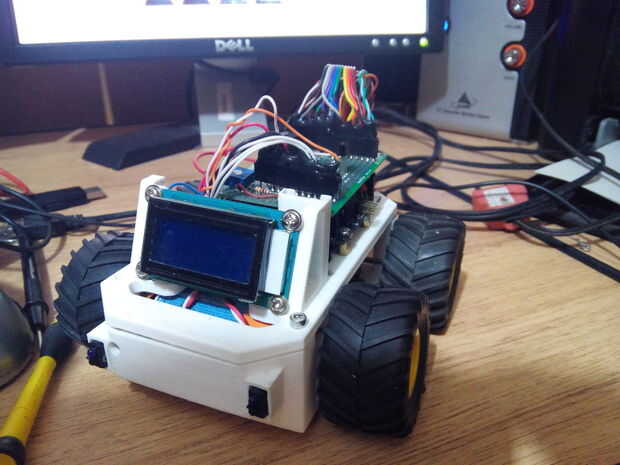
El nRover, es un tablero pequeño diseñado para construir pequeños robots como UGV (vehículos terrestres no tripulados), seguidor de línea o automatización del hogar, puede ser controlado por wifi, Bluetooth o radio control. El objetivo principal es el desarrollo de una solución de pequeños componentes electrónicos, baratos, fáciles de encontrar y que pueden construirse para cualquier persona con pequeños conocimientos de montaje electrónico.
La primera versión de esta placa fue utilizada en mi proyecto final de graduación de Mecatrónica industrial, el objetivo de este proyecto son:
• Microcontrolador con 8 bits y frecuencia de reloj de 16 a 20 MHz
• Fáciles de encontrar, fácil de montar y no soldar componentes (SMD).
• Sólo tres puertos del microcontrolador para el control de dos motores eléctricos pequeños dejando libre más puertos para otro uso.
• Tamaño pequeño compatible con Arduino shields.
Voltaje de funcionamiento de • 7.0 a 15 V.
Hay un montón de escudos para Arduino con la función de control de motores eléctricos pequeños, pero algunos de ellos emplean tecnología de montaje superficial, que puede convertir una tarea para reemplazar un componente dañado, duro y costoso, porque se necesitan herramientas especiales y experiencia, además en algunos países estos componentes no son tan fáciles de encontrar.
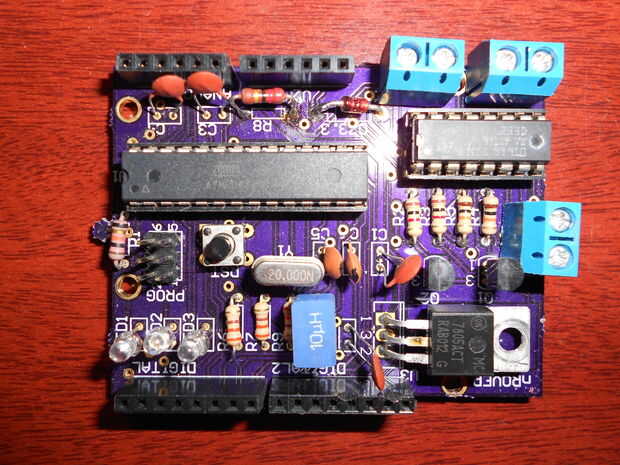
Básicamente, el tablero está compuesto por un microcontrolador Atmega 328p y un puente en h L-293D, además de los componentes pasivos, con esta configuración pueden controlar dos motores eléctricos pequeños, usando solamente dos puertos del microcontrolador para cambiar la dirección de la rotación (adelante y atrás) y un perno para cambiar la velocidad de rotación (PWM), dejando los otros puertos del microcontrolador gratis , para usar en otras aplicaciones.








")




