Paso 17: ejemplos
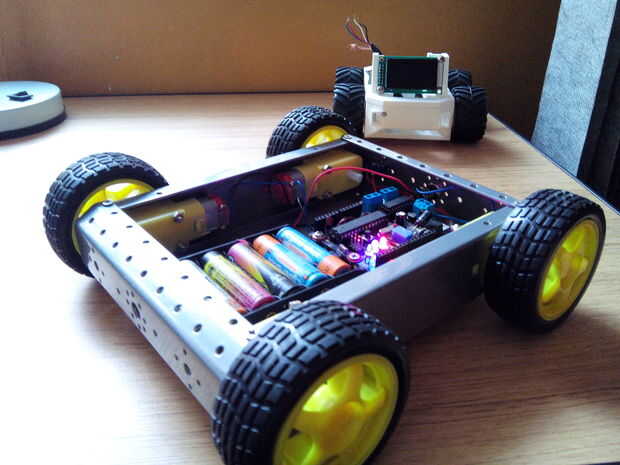
nRover en un SainSmart 4WD unidad móvil Robot plataforma de aluminio
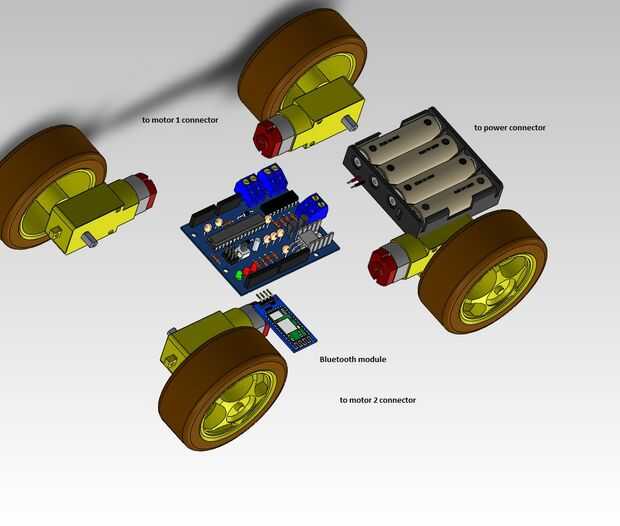
Control mediante comunicación serial o Bluetooth, los motores del lado derecho estaban conectados a MT1, los motores del lado izquierdo a los conectores de MT2.
Los pernos de RX/TX de nRover fueron conectados a un Módulo Bluetooth.
A todo esto instructable archivos para hacer el PCB (versión optimizada), se recomienda servicio Parque de SST.








")




