
vídeos del robot se pueden encontrar en: http://www.phantasm1.com/videos.html
Echa un vistazo a ver Ladibug en acción.
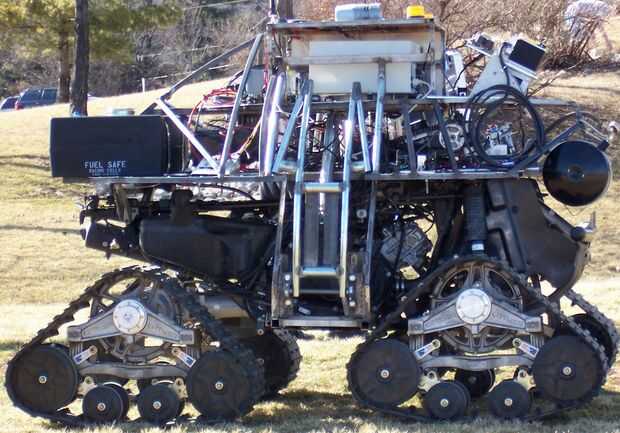
Mi primer paso fue quitar todas las cubiertas de plástico y componentes de la interfaz humana. como barras de la manija, asiento, pies descansa etc.. Entonces tuve que construir un deck o plataforma para sujetar todos los equipos, controladores de motores y sensores. En esta foto puedes ver que la dirección se ha instalado con un motor grande rescatado de una silla de rueda eléctrica. He añadido un soporte personalizado para la rueda de gran diámetro donde estaban las barras de la manija. a continuación, piezas usadas de mis hijos trampolín para construir la jaula del rodillo. y soporte para el avance de apenas cubierto, también montado de la dirección es la pequeña caja azul que es el regulador del motor construido por Roboteq. Este controlador puede manejar 24 voltios a un amperaje máximo de 120 para la dirección.





")

![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")





