Paso 3: Paso 3: elaboración y codificación de
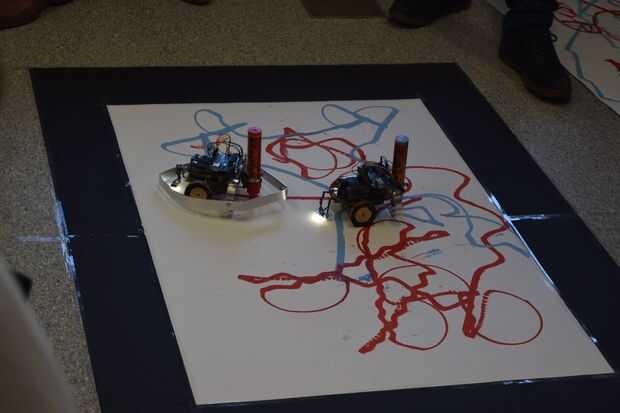
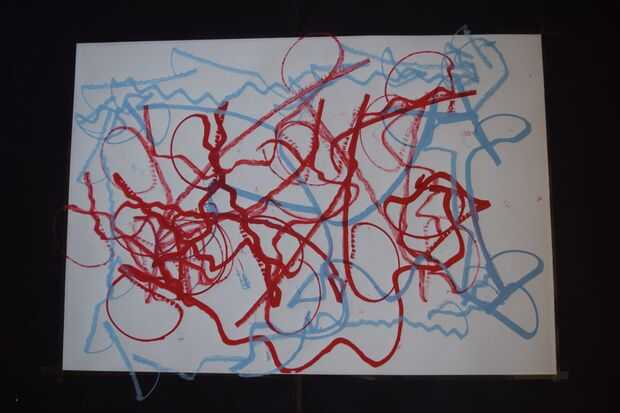
Se construyó dos artbots y uno con un marcador de pintura acrílica azul y el otro había equipado con un marcador rojo.
Utilizamos los valores r, g y b del sensor de color para definir los límites entre negro, rojo, azul y blanco. Las mediciones están muy propensos a disturbios tales como desviaciones pequeñas en la distancia de la tierra al sensor, nos aseguramos que los márgenes eran muy grandes.
Encontramos que necesitábamos enviar valores ligeramente diferentes de PWM a los motores para hacer a los robots ir recto. Un error de que no encontramos la causa (las sugerencias son bienvenidas!)
En nuestra demostración, los robots tenían dos modos. La primera instrucción que "siga recto y gire cuando se encuentra una línea roja o azul", el segundo es una función del seno donde el período de seno aumentar o disminuir cuando las líneas fueron encontradas. Papel negro fue utilizado para los límites externos, los bots haciendo un movimiento de "volver atrás y girar" cuando se encontraron con negro. Después de encontrar diez líneas, los bots cambiar entre modos.
Por supuesto, muchos otros escenarios pueden pensarse. Si tienes otras ideas para el comportamiento del robot, dude en compartirlas con nosotros en un comentario.
Nuestro código de Arduino puede encontrarse en el archivo zip.





 del color")





")
 Altavoz caja alarma del gato")
