Paso 2: preparar la ballesta para control digital
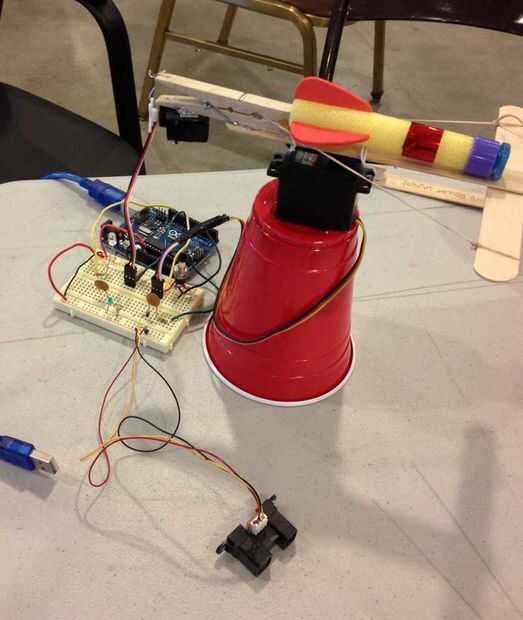
2) tira un pedazo de 2 pulgadas de alambre de conexión
3) Conecte el cable a la pinza para la ropa
4) goma o hotglue un servo a la parte inferior de la pinza para la ropa
5) Conecte el cable de la pinza en el brazo de un servo
6) conectar el servo a la placa (redwire al poder blackwire a tierra)
7) conectar el servo a la arduino (cable amarillo con conector de 10)
8) la placa de arduino (5v y masa) de alimentación
9) conexión un monentary interruptor de tierra en el protoboard al pin 2 de arduino
10) programa aruduino con el siguiente código
---para más información sobre cómo programa arduinos; Revisa esta serie de videos http://www.youtube.com/watch?v=fCxzA9_kg6s
11) prueba de la pistola de dardos digital, pulsando el botón
/////////////////////////////////////////////////////////////////////////////
PRUEBA de disparo por mdwilson 01/05/2013
#include < Servo.h >
Gatillo del servo; crear objeto servo para controlar un servo
const int buttonPin = 2; el número de pin pulsador
const int ledPin = 13; el número de los pines del LED
int buttonState = 0; variable para lectura del estado del pulsador
void setup()
{
pinMode (ledPin, salida); Inicializa el pin LED como salida:
pinMode (buttonPin, entrada); inicializar el perno pulsador como entrada:
digitalWrite(buttonPin,HIGH);
Trigger.Attach(10); se fija el servo en el pin 9 al objeto servo
Trigger.Write(0); / / configurar la posición de disparo inicial
}
void loop()
{
leer el estado del pulsador valor:
buttonState = digitalRead(buttonPin);
Si se presiona el botón de disparar
Si (buttonState == LOW) {}
Trigger.Write (45); //send el servo de gatillo a 45 grados
digitalWrite (ledPin, HIGH); / / enciende el led
Delay(1000); esperar 1 segundo
Trigger.Write(0); enviar el servo de disparo a 0
digitalWrite (ledPin, LOW); Apagar el led
}
}



.")








