Paso 8:
Tomar hasta ahora que el bastidor está construido, tienes que configurar y asegurar la APM para el marco.
Comience calentando tu pistola de pegamento caliente y cautín.
Tomar el nylon 4 tornillos incluyen y seguro la mujer grande scew masculino a cada esquina del bastidor con sus tornillos.
Mira la imagen principal para dar una idea de lo que descrito,
No debe la soldadura en los pernos en la Junta, tomar referencia de mi video de como soldar.
Te conviene soldar los pines doblados de 90 grados hacia el frente del tablero y la parte posterior de la placa, no necesita slder las otras patas, así que mantener los extras seguro.
Una vez que se aseguraron los tornillos de nylon, debería funcionar en los soportes para sostener el elástico.
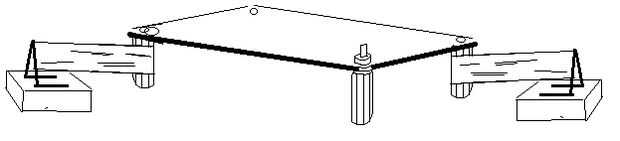
Debe crear 4 montajes con el cable y asegúrese de que son más altos que los tornillos de nylon para que cuando el controlador de vuelo, está suspendido por encima de la placa...
Coloque el controlador de vuelo en el centro del tablero con la flecha blanca apuntando hacia los brazos rojo.
ahora espacio el cable de unos 2cm de cada esquina se monta y enganche la cinta de goma en la pierna, caliente pegamento en su lugar con las piernas hacia dentro. y las bandas se extienden sobre cada pierna de nylon de la Junta.
Tampoco debe ser suspendida justo encima de la estructura o ligeramente tocando.
Si es cerca de la junta puede levantar los stands o tratar de poner la goma en la parte inferior de los tornillos de nylon.
Otra opción sería comprar algún elástico de la ropa, enrolla las partes pequeñas y pegamento debajo de cada pata.
Ahora que la Junta está colocada y asegurada, es el momento de instalar el gps y Mavlink
Como dije en el video, la APM viene con dos cables, uno para el gps y otro para el MAVink
Simplemente retire el enchufe blanco a servo enchufe el gps y mavlink y mantener a salvo.
Ahora ajuste los tapones a la mavlink y gps, los enchufes blanco pequeño ir la los módulos y los tapones más grandes a la Junta.
Asegúrese de que el cable rojo va a vdd en el módulo (en este punto que le recomiendo que vea mi video de apm configuración)
Tomar el elástico o alternativa si usted no podría conseguir cualquier (2cm ancho tiras de papel)
rodillo hasta un grosor de unos 2 cm y asegure con cinta.
Con tu pistola de pegamento caliente, pegar el botón gps en uno de los rincones más lejos de la Junta.
Ahora que se pega en su lugar, tome algunos cinta y pegarlo a la base del gps para que cuando se cola en su lugar, no daña los componentes que desea quitar.
una vez que la cinta esté en su lugar, poner pegamento caliente en la parte superior de la almohadilla, que coll durante unos 10 segundos el gps en la almohadilla y pulse sostenga en su lugar durante unos 5 segundos.
Ahora se asegura el gps se puede introducir en la Junta, el enchufe es el rito frente y enfrentarse directamente.
Depende de usted donde seguro la MAVlink, pero trate de colocar en un rincón.
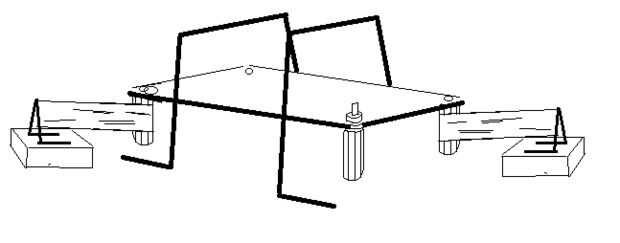
Ahora que el sistema se asegura, es tiempo para el receptor.
Usted puede colocarlo donde quieras, pero te recomiendo tomar un alambre y la construcción de un pequeño marco para sentarse sobre el APM, ver imagen 2.
Una vez que la construcción del marco, caliente pegamento en su lugar, hacer demandarlo no toque el APM.
En este marco puede colocar el receptor y la barra a la misma con cinta adhesiva para si desea quitarlo más tarde no tienes pegamento caliente sucio.
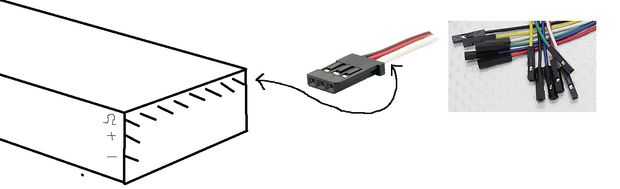
ahora debe conseguir los conectores de servo de macho a macho, es probable que haya comprado o el enchufe de uno de los pines de los tapones de 3 pines con un cable rojo blanco y negro.
Buscar en el lado del receptor, verá 3 símbolos, un negativo que un positivo y un Ohm (Ω)
Enchufe un extremo de un conector de servo en cada uno de los pasadores de ohmios, si tienes la versión de 3 alambres entonces basta con conectar uno en cada 3 pernos asegurándose de que el cable blanco va al pin ohmios.
Ver la imagen 3 para obtener ayuda.
Si tienes solo servo enchufe conduce luego conecte 8 a los pasadores de ohm, uno al positivo y al negativo.
Con la rx ahora por cable que necesario conectar los cables al controlador de vuelo
con la placa plana, los primeros alfileres son los pines de señal, si te fijas en la parte inferior los pernos deben etiquetarse 1 a 8 y lo mismo para el receptor, simplemente enchufe en orden y no olvide conectar los cables de dos corriente correctamente, los pines del centro son positivos y los pernos de la parte inferior son negativos.
Ahora, el receptor debe cablearse.
Debe referirse al vídeo sobre la configuración apm con nplanner missio, por favor también descargar e instalar los siguientes
Asegúrese de que descarga e instala lo siguiente en su computadora
http://ardupilot.com/downloads/http://ardupilot.com/downloads/
Este es el driver para la selección de telemetría la versión rite para ordenador
http://www.ftdichip.com/drivers/D2XX.htm






")






