Paso 8: Motor: CAD y FEM
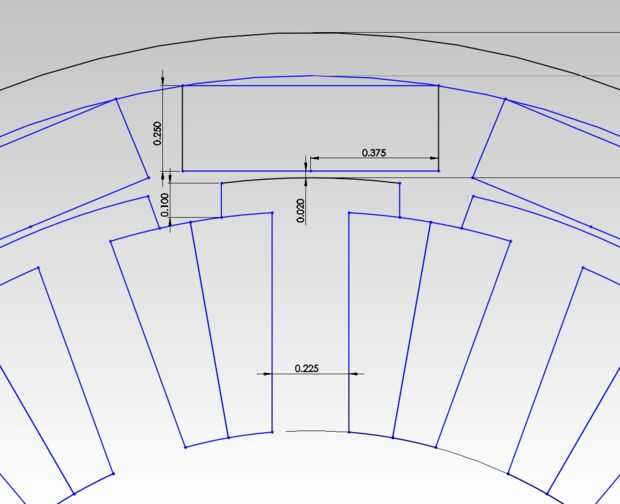
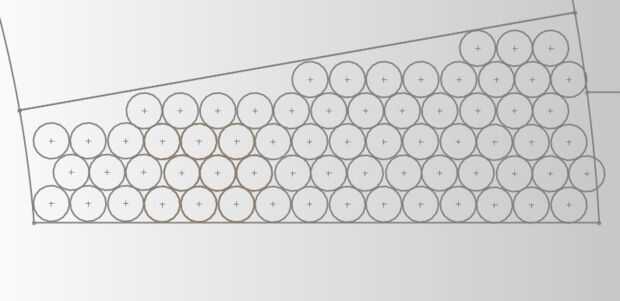
Una vez que tenga el perfil, puede ver cuántas vueltas de alambre podrían caber idealmente entre cada diente. Sabía que necesitaría un montón de alambre para un motor tan grande, así que decidí basar mis cálculos de alambre magneto 18AWG, que está a poco más de 1mm de diámetro, lo que es relativamente gruesa. Por cerrar-embalaje el cable, me encontré con que podía colocar unos 68 vueltas alrededor de cada diente. Sin embargo, esto resultó para ser muy poco realista. Mientras desenrolla el motor sólo conté 42 vueltas de 18AWG cable, que fue agradable porque no agrupar hacia la punta. Después de realizar un prueba de viento, encontré que podía colocar 45 vueltas de 18AWG cable sin mucha dificultad. Yo también quería capaz de funcionar continuamente mi motor a corriente alta. Un filamento de alambre de 18AWG puede sostener alrededor de 16 amperios, por lo que para asegurarse de que sería seguro operar a la 120A máximo de mi controlador del motor que decidí usar 9 cables en paralelo para lograr una ampactity de 144A. Esto permitiría unas 5 vueltas de 9 cables en paralelo sin obstaculizar las bobinas demasiado. Recuerde que más vueltas significa más esfuerzo de torsión, pero menos velocidad y menos amperaje, por lo que necesita equilibrar los cables en serie y paralelo basado en sus limitaciones de diseño.
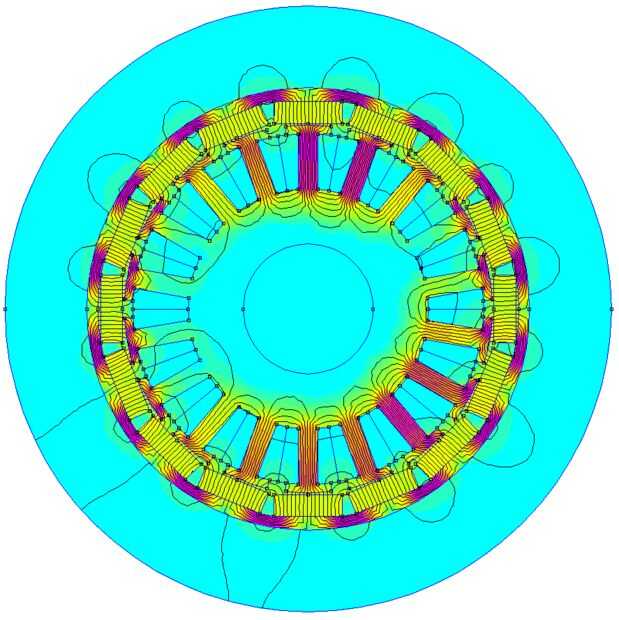
Magnetismo de método de elemento finito es un programa FEA que simulan el funcionamiento de un motor eléctrico. Al importar un archivo de la sección transversal del motor en el programa y asignación de cada material del bloque y propiedades magnéticas, el programa puede proporcionar una variedad de información sobre las condiciones de funcionamiento. Puede ver la figura colorida que muestra una representación gráfica del flujo magnético para mi motor.
FEMM calcula un par de 21.96N * m 100, que rinde un motor k constante de.11 (N * m). Una vez supe k, encontré que RPM/voltio del motor sería 43.5, rendimiento 1740 RPM máximas en 40V. Con 16 pares de polos del imán, esto sería así por debajo del límite de 8750 RPM del controlador.







 3.0 y 2.2.1")

![Cómo hacer un cigarrillo eléctrico [muy fácil]](https://foto.askix.com/thumb/170x110/e/d3/ed344415bca99f15e5a625e3d7d6924a.jpg "Cómo hacer un cigarrillo eléctrico [muy fácil]")



