Paso 3: Realizar la mano robótica










Esta es la parte más complicada, porque hay que elegir los materiales adecuados para hacer la mano, pero puede ser también fácil si tienes la posibilidad de 3D imprimir la mano (hay muchos proyectos 3D en la web para la impresión de piezas de mano).
Empecé a hacer los dedos con corcho para encontrar la estructura adecuada para los movimientos, luego he hecho con una rama.
Así que tres cilindros de madera por dedos, dos de ellos con 1 cm por encima de la longitud normal de su Falange, necesario para encajar una pieza en otra.
Luego con una amoladora angular realizar los surcos para hacer las piezas encajan entre sí (ver las imágenes, usted entenderá mejor).
Necesitarás algún papel de lija para hacer las piezas curvas, que puede girar.
Use un taladro para hacer los agujeros de la bisagra, luego tienes que hacer otros dos orificios para el cable de pesca, verticalmente, una hacia el interior de la mano y hacia el exterior. Así se cerrará cuando los cables se fijan en la parte superior del dedo, cuando pase el dedo de un inwardsthe, y cuando tire el uno hacia fuera el dedo se abrirá.
La palma fue problemática, porque hice inicialmente con la madera y las partes más delgadas siempre se rompieron. Así que decidí hacerla de acero y he no he tenido problemas.
Cortar y hacer algunas protuberancias similares a los realizados para que los dedos fijar a la palma (ver las imágenes como referencia). Continuación, utilice el taladro para hacer los otros orificios para el cable de pesca, el pulgar será complicado porque no es vertical como los dedos de allí.
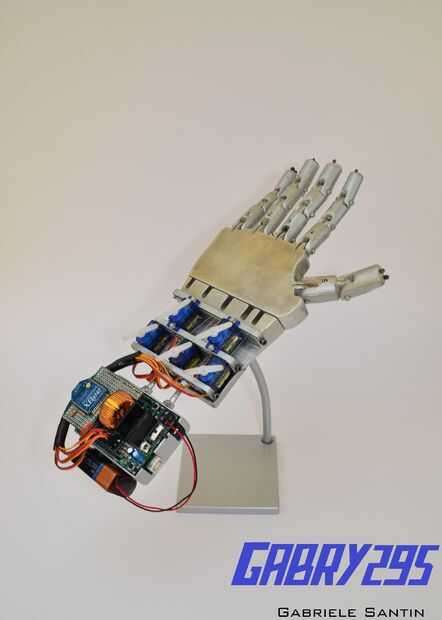
Después de hacer la mano, necesita hacer un soporte para los cinco servomotores y un soporte para Arduino UNO juntas. Asegúrese de elegir la posición de los servos, por lo que no toquen mientras gira.
La última parte consiste en conectar los dedos a los servomotores: fijar los cables de pesca en la parte superior del dedo y hacerlos pasar por los agujeros; Cuando los cables están en la parte inferior de la mano, girar el rotor (manualmente, sin que lo acciona) en su máximo valor de rotación (180 º) por lo es en una posición vertical, entonces el conjunto el alambre que cierra el dedo en el orificio inferior del rotor, por ejemplo, hacer un nudo; Gire nuevamente el rotor en 0° (otra vez es vertical y el nudo hecho antes en la parte superior) establezca el otro cable (el cual abre el dedo) en el orificio más bajo del rotor. Siga la última imagen en este paso para entender mejor.
Así, cuando el motor está en 0° (vertical) se abre el dedo y cuando el rotor está en 180° (vertical otra vez) el dedo se cierra.













