Paso 3: Juntándolo todo
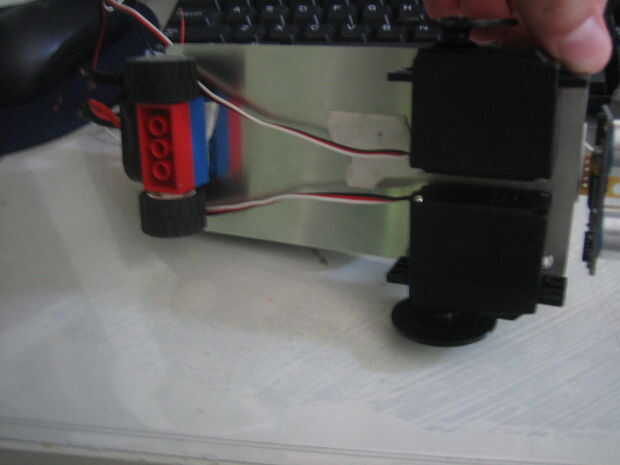

Entonces sujete a (gigante) en la batería de mi caso en la parte superior del metal. Luego coloque el sensor Ping en un trozo de pcb y hacer con el final del servo se cortó y ahora tienen la mayoría de lo hecho.
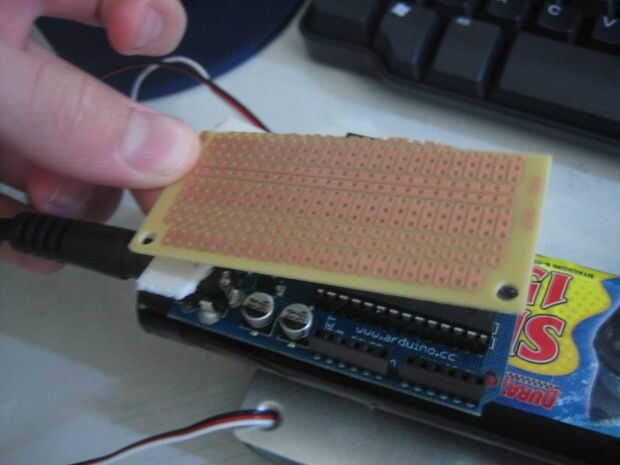
Luego conectar el Arduino en la cima de la pila. Para la comparación de tamaño un poco aquí es qué tan grande debe ser este robot...






")






 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")