Paso 1: Conocer las piezas (MP)

¿Has oído hablar de Arduino Uno? Si no es así, es este microcontrolador fácilmente programable que le permite construir productos frescos. Si usted no tiene ninguna experiencia, volver a esta página después de aprender sobre arduino uno.
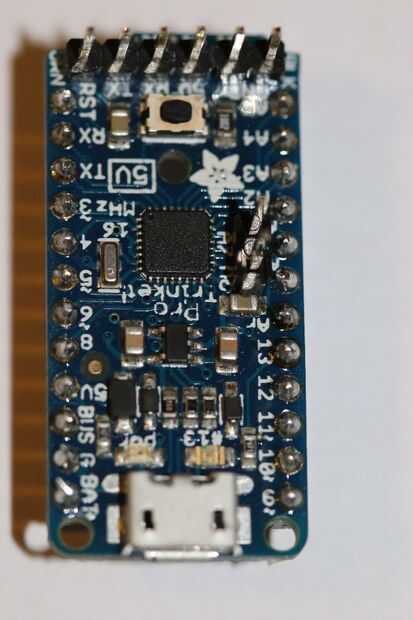
Para aquellos de ustedes que conocen, vamos a trabajar con un primo cercano de él, Adafruit Pro-trinket, 5 voltios. Puede funcionar en exactamente el mismo código como un uno, para que ningún nuevo IDE debe estar instalado. El PCB azul que ves es la baratija Pro. Esto es básicamente el cerebro de tu robot.
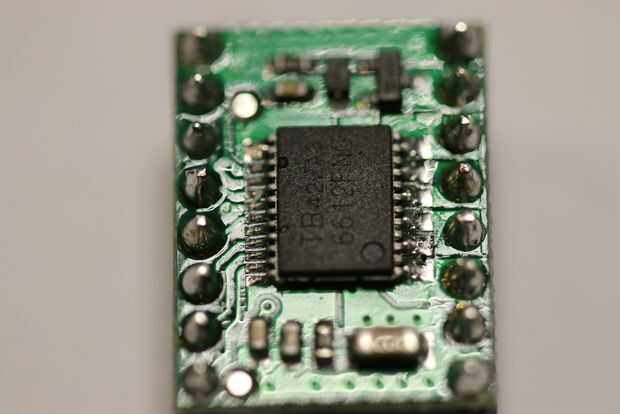
En cuanto a lo que sus motores se controlará por, cumplir con el puente H TB66FNG. Este tipo permite que tus motores para moverse en dos direcciones, hacia adelante y hacia atrás.
Para permitir que nuestro robot recibir comandos desde el mando a distancia, vamos a utilizar este pequeño bulbo negro, llamado un sensor IR. Interpreta el código que el control remoto y envía ese código a la baratija. Cuando se da una cierta señal, dice el robot se mueva en cierta dirección.
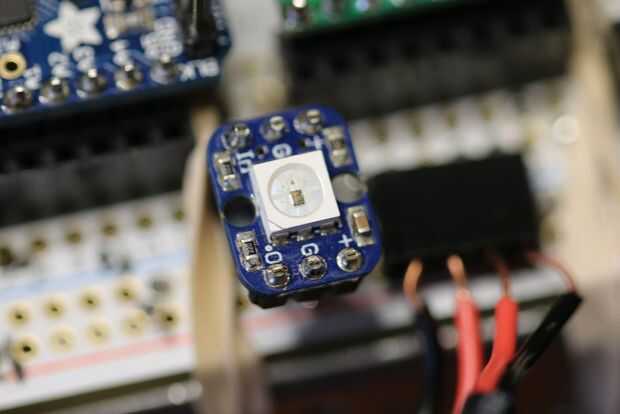
Otro toque a esta placa madre (prototipo 4 por cierto) es el neopixel. Es nuestro indicador de qué dirección se está moviendo en nuestro robot. Cuando está modificando este código, el neopixel es una herramienta perfecta para depurar problemas. Por defecto nuestro código tan verde es hacia delante; rojo está de vuelta; queda amarillo; y azul es correcto. Estas opciones de color son opcional.
 - controlado por iPhone, basado en arduino")












