Paso 1: Lista de materiales
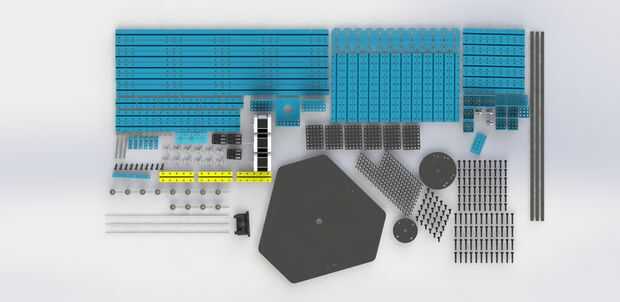

Lista de piezas mecánicas:
Soporte Motor de 3 × 42 azul paso a paso
6 × viga 0824-496
12 × viga 0824-160
6 × viga 0824-144
3 × viga 0824-96
3 x Beam0824-6
6 × Beam0824-3
6 × 20 Beam0824
24 × teniendo 4 x 8 x 3
6 × soporte de 3 x 3
3 x soporte U1-azul
Eje del círculo de 3 × 4 X 56
6 × Cruz empotrado pan de cabeza aprovechando tornillos-C ST2.2 × 9.5
Soporte de eje x 12 D4
Tornillo sin cabeza de 12 × M3 × 5
3 × Me Motor paso a paso
Barra del hilo de rosca de 6 × M4 (280mm)
1 x interruptor micro soporte B
60 × tuerca M4
15 × Tuerca M3
Polea de nylon de 12 ×
12 × placa O1-azul
3 x cinturón conector azul
Remache plástico de 10 × R4060
1 x pinza de robot
1 x bandeja
12 x tornillos M4 × 8
78 × tornillos M4 × 14
60 × tornillos M4 × 22
× 12 tornillos M4 × 35
15 × tornillo M3 x 8
2 × autoperforantes tornillo M2 x 10
1 × servo
Collar eje de 6 × 4mm
Polea de sincronismo de 6 × 18T
× 12 varilla hembra terminan teniendo
Bloque de terminales de 3 ×
Lista de módulos electrónicos:
× 1 Me-zócalo
2 × Me RJ25 adaptador V2.1
3 × Me Driver Motor paso a paso
2 x 6P6C RJ25 cable 20cm
3 x 6P6C RJ25 cable 50cm
1 x pared adaptador fuente de alimentación 12VDC × 1
1 × Me Joystick V1.0
4 x cables
1 x USB A macho a B macho Cable



")

")







