Paso 4: cableado
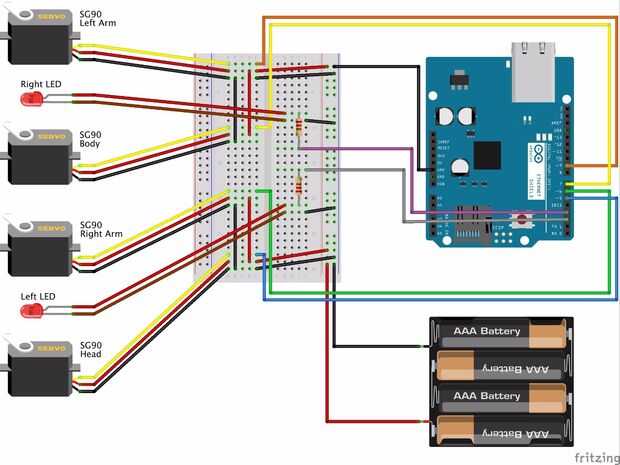






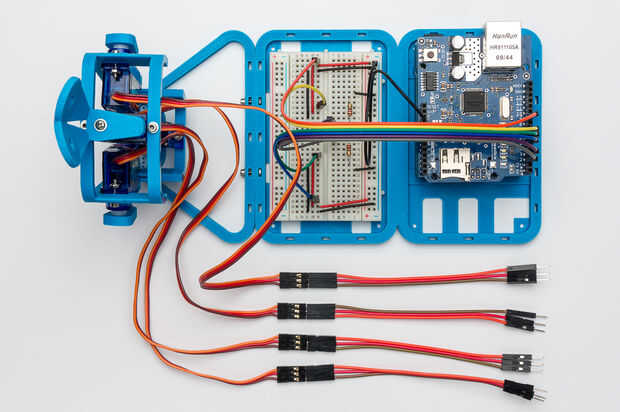

Conexión Arduino Uno con protoboard:
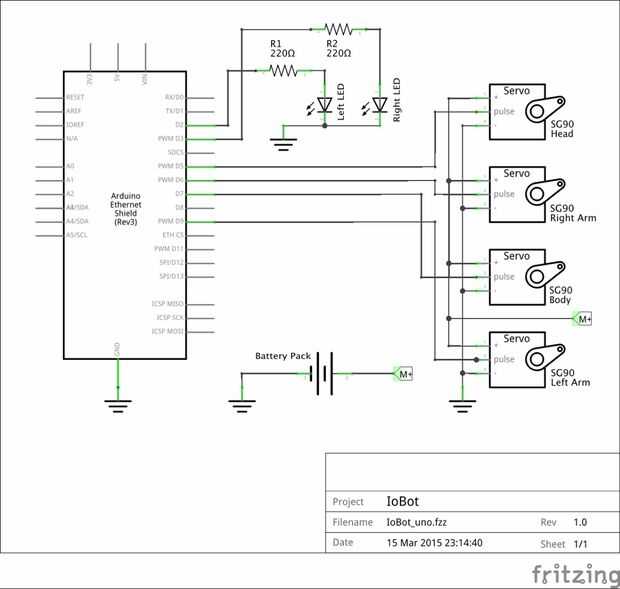
En primer lugar, siga la conexión en la 'placa' usando ' 1/0.6 mm alambre sólido' en dos colores y pone en la derecha colocar '220 ohm resistencias' 2 x.
Los colores de los cables no tienen importancia para el funcionamiento del circuito pero es bueno adoptar el principio que negro siempre significa rojo y GND VCC. En este proyecto, se sustituye el cable negro en algunos lugares con BROWN porque mi 'Servos SG90' tienen el cable marrón de la tierra.
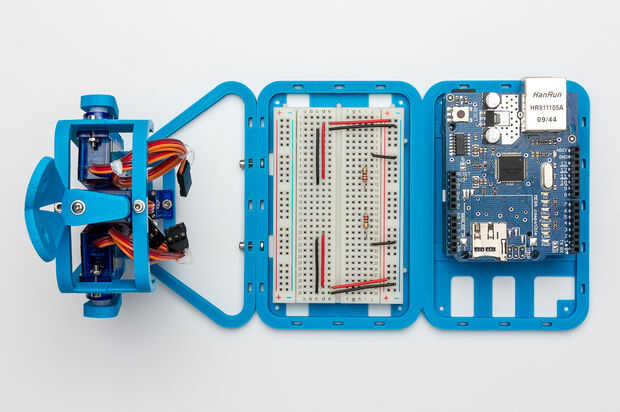
- Cortar las piezas de' sólido' dejando ~ 7mm a cada lado, para que puedas doblarlas y colocar en la placa.
- Quitar el aislante de los extremos del cable (~ 7 mm), doblar y colocar los cables en la 'placa' según el esquema.
- Montaje de las 'resistencias de 220 ohm' en la 'placa'
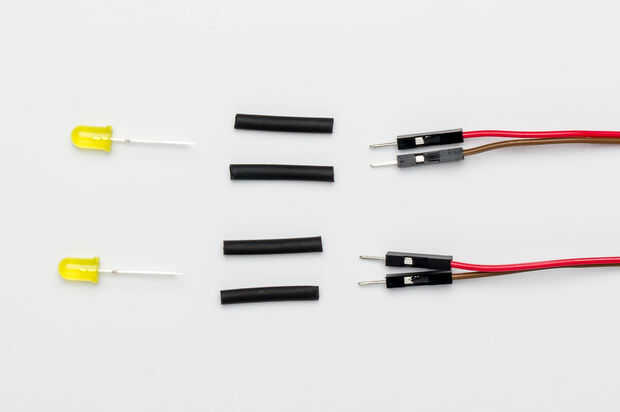
LEDs:
- Conectores de corte de un lado del 'Dupont Jumper cable conector macho 30cm longitud'
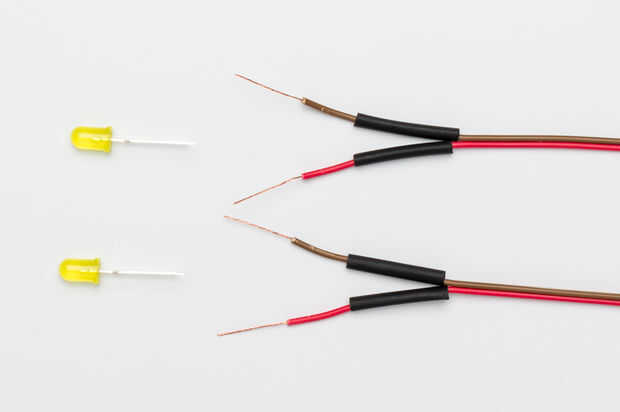
- Retire aproximadamente 15-20mm de aislamiento de los cables
- Enrolle los cables alrededor de los terminales del LED. Ten cuidado, los LED son sensibles a la polaridad, esto significa que los cables deben conectarse al electrodo correcto de LEDs +. En nuestro caso, conecte el cable marrón al cátodo (cable negativo-, más corto del LED) y el rojo al ánodo (positivo +, más cable de LED)
- Si tienes un soldador, soldadura de estas conexiones. Si no, asegúrese de que las conexiones son lo suficientemente fuertes. La cabeza del robot gira muy rápidamente y los cables pueden deslizarse si no estarán protegidos.
- Apriete el 'calor del encogimiento manga' usando el encendedor. Mantenga una distancia apropiada del fuego, calienta demasiado fuertemente puede coger fuego. Nota: Este trabajo debe ser realizado por adulto!
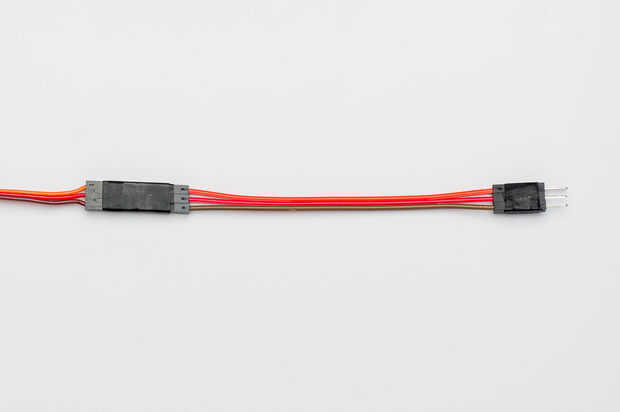
Conecte el Robot:
- Conectar 'Dupont puente cable conector macho de 10cm de longitud' cada 'Servo SG90'
- Asegurar esta conexión con cinta aislante para que los conectores no se desconexión durante los movimientos del robot.
Usted puede utilizar 3 encabezado fila única manera conector 2,54 mm Pitch, 17 mm longitud patillas ' en lugar de 'Dupont Jumper cable conector macho de 10 cm de longitud'. Creo que esta es la mejor solución pero lo hice con 'Jumper Wires', porque son fácilmente accesibles y probablemente todo el que juega con el Arduino encuentra en un cajón.
- Colocar los LEDs en los agujeros del ojo de la cabeza de robot y conectar sus cables
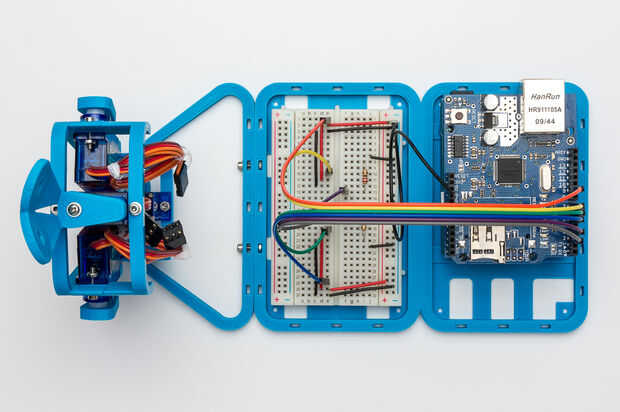
- Conectar los cables "SG90 de servo"
- Montaje de los cables de una manera por lo que no pueden bloquear el movimiento del robot, usted puede fijarlos con la 'Atadura' o 'Cinta'
Ahora debería haber terminado la IoBot. La última foto muestra la conexión a la fuente de alimentación y LAN. Pero antes de conectarlo, debes subir el sketch de Arduino y realizar una calibración breve.










")


