Paso 4: Desarrollar el software para su Honda!

Ratón del USB
=========
La primera pregunta refiere a la USBMouse. Las opciones son un ratón relativo o absoluto. La respuesta es muy sencilla porque el mbed para no conoce la posición absoluta del pájaro en la pantalla, por lo que la solución natural es un ratón relativa (como un ratón normal) - Coloque el cursor sobre el ratón, luego el tirachinas asumen el control y se mueve en relación con el punto de partida basado en la interpretación de las manipulaciones de la Honda.
Ángulo de la catapulta
=============
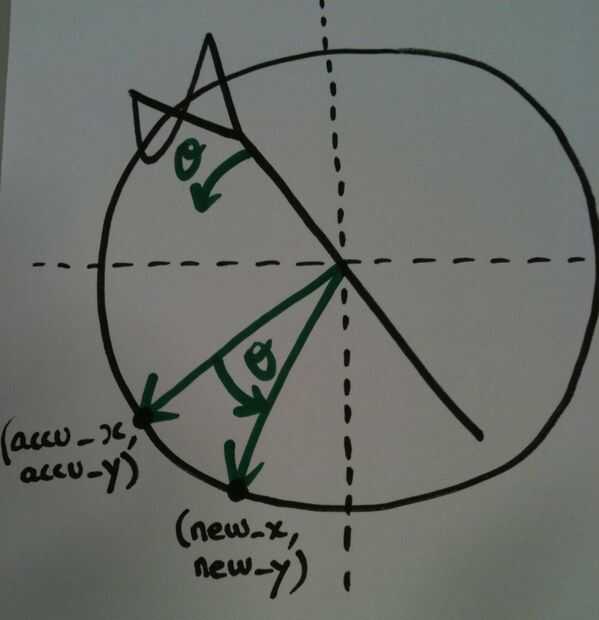
El ángulo de la Honda es lo más importante: tenemos que calcular la dirección del vector a la posición del ratón.
Utilizamos simplemente el hecho de que sabemos que la gravedad está causando una fuerza de 1G en el acelerómetro y utilice para calcular el ángulo de la Honda con algunos trigonometría simple.
Movimientos del ratón
================
La posición del ratón entonces se calcula basándose en el desplazamiento del vector calculado el ángulo de la Honda y la lectura del sensor de estiramiento.
Porque enviamos movimientos relativos, realmente calcular la posición deseada, después trabajar la diferencia de que sabemos que somos y enviamos.
Algoritmo de
========
La idea general de cómo funciona un disparo completo viene en unos pocos pasos:
LA ESPERA:
-Empezamos por la espera, con el cursor sobre el pájaro - independientemente de cómo nos incline la Honda, no pasa nada
-Cuando vemos un tramo suficiente, consideramos que el principio de apuntar y haga clic en y mantenga presionado el botón izquierdo del ratón
CON EL OBJETIVO DE:
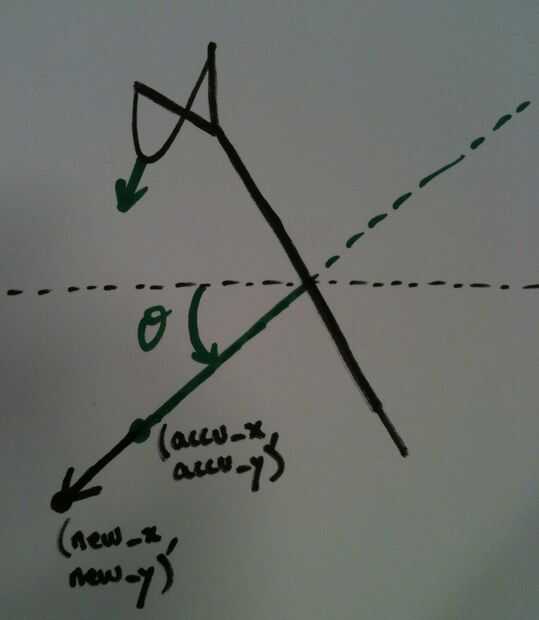
-Entonces continuamente calculamos un vector basado en el ángulo de la Honda y el tramo de la eslinga
-Esto se traduce en movimientos del ratón relativa con algunos más trigonometría, y el ratón se mueve según corresponda
-Como somos posicionamiento basado en un vector pero envío de posición relativa del ratón, tener una nota de los movimientos acumulados para que podamos enviarle la diferencia cada vez
DE COCCIÓN:
-Entramos en disparar cuando vemos una reducción rápida en el tramo Honda
-En este punto nos suelte el botón del ratón, luego regresar el ratón a la posición inicial, lista para el siguiente tiro!
Configuración del ratón:
===========
Usted puede encontrar el algoritmo anterior implementado en este programa. Pero tienes que tener en cuenta que depende de varias cosas:
-la posición del acelerómetro
-la conexión y la longitud del tramo sensor
La primera vez que probé mi slingshot, el cursor en la pantalla no volvía exactamente en la misma posición inicial después de una sesión. Para resolver este problema, he modificado esto en Windows:
-ir al Panel de Control
- Hardware y sonido
- Ratón en la sección dispositivos e impresoras
-en la ficha Opciones de puntero , anule la selección de precisión del puntero de Enhance
-También puede reducir la velocidad del cursor
Un buen rato con la Honda de mbed para USB:
=================================
Resulta funciona! Aquí está en acción!
Vea también:
========
- sitio web de mbed para
-Tirachinas de artículo en la Página Web de mbed para
- biblioteca de mbed para USB












