Paso 3: El código
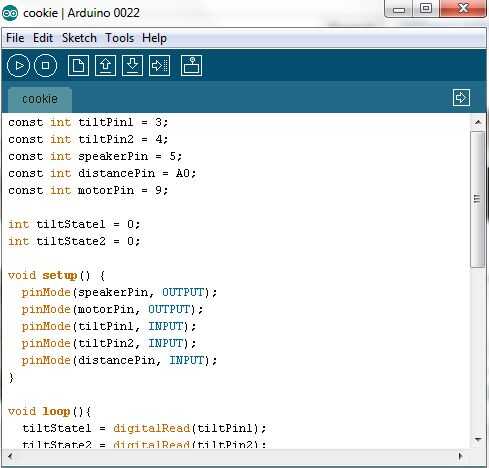
En primer lugar, iniciar y definir todas sus variables. Aquí está el código que usé:
const int tiltPin1 = 3; int tiltState1 = 0; void setup() {}
const int tiltPin2 = 4;
const int speakerPin = 5;
const int distancePin = A0;
const int motorPin = 9;
int tiltState2 = 0;
pinMode (speakerPin, salida);
pinMode (motorPin, salida);
pinMode (tiltPin1, entrada);
pinMode (tiltPin2, entrada);
pinMode (distancePin, entrada);
}
A continuación, definir las condiciones y todos los comportamientos. Aquí está cómo lo hice:
void loop() {}
tiltState1 = digitalRead(tiltPin1);
tiltState2 = digitalRead(tiltPin2);
int val = analogRead(distancePin);
Si (val > 450) {/ / si un objeto es "cerrar"
digitalWrite (motorPin, HIGH); Apague el motor en
}
Else {}
digitalWrite (motorPin, LOW);}
Si (tiltState1 == HIGH) {/ / si (caso 1)
tono (speakerPin, 131, 125); alarma sonora
Delay(125);
noTone(speakerPin);
Delay(125); }
Else {}
noTone(speakerPin); }
Si (tiltState2 == HIGH) {/ / si (caso 2)
tono (speakerPin, 131, 125); alarma sonora
Delay(125);
noTone(speakerPin);
Delay(125); }
Else {}
noTone(speakerPin); }
}






![Cómo hacer una caja de tapa de Arbol de Origami (ver. 3) - TCGames [HD]](https://foto.askix.com/thumb/170x110.png "Cómo hacer una caja de tapa de Arbol de Origami (ver. 3) - TCGames [HD]")




