Paso 4: Mecánica y electrónica diseño






Después reuní las persianas y motores hice una prueba de mecánica. Por suerte, la simulación de engranajes en Solidworks no decepcionó. Usted puede ver hay algunos interruptores de presión en ambos extremos del engranaje, se llama tope y son un elemento importante cuando se utiliza un motor paso a paso. Aunque los motores paso a paso pueden hacer un movimiento muy preciso como cuando se usa para conducir la máquina CNC, no saben realmente su posición como servomotor no y nunca se sabe si ha activado algo que al final todos no. Final de carrera es un switch (interruptor óptico a veces) que parte móvil llega al final de un movimiento para determinar si la pieza ha llegado al final (o comienzo). Por ejemplo, cuando un explorador arranca usted siempre puede ver la barra de exploración se está moviendo hacia la parte inferior (o superior) del explorador, dicha acción restablece el escáner y asegúrese de que se inicia la exploración de la ubicación de inicio.
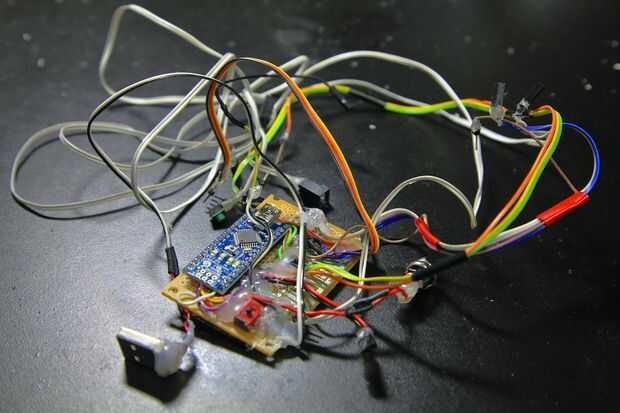
Los motores son impulsados por un par de controladores de motor paso a paso que toman las órdenes de un Arduino Nano, que también toma las señales de topes y toque la señal del sensor así como controlar el frente LED, LEDs para iluminación de los ojos del usuario (porque los ojos son demasiado oscuros para ser visto cuando cubierta por el casco) y la luz del flash.
La imagen de captura y visualización son realizadas por un embedidos, que comunica con Arduino para recibir los datos de contacto y el tiempo de la captura de imágenes.
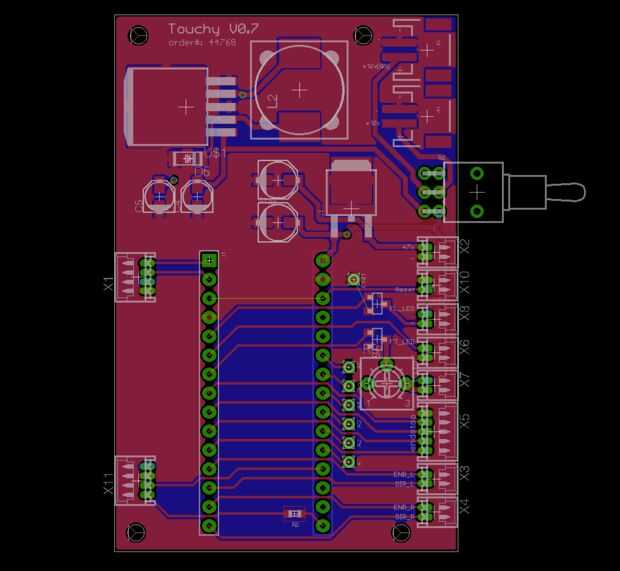
Todo el sistema fue probado en un perfboard con un circuito personalizado. Después de confirmar el correcto funcionamiento en el perfboard solía águila diseñar mi PCB y producir el tablero de circuitos impresos de China. Seeed Studio produce junta de muy alta calidad a un buen precio y tiempo con sistema de pedidos muy fácil de usar (tomar orden/comunicar en inglés así.)




!")








