Paso 4: Cable una fuente de alimentación y controladores
Usted querrá encontrar un dispositivo para controlar el poder de tus motores. Hay muchas opciones para elegir, incluso el motor de combustión. Sin embargo, nos centraremos en un tanque simple robot del estilo de dirección con dos motores.
Ya que podemos programar nuestros movimientos de robots, una combinación de escudo de microcontrolador + motor podría funcionar. Para bajo básico robots un dispositivo frambuesa Pi (o similar) puede utilizarse con WiringPi http://wiringpi.com/ para controlar un Arduino que controla el regulador del motor. Para robots más complejos usted podría optar por un sistema ITX Intel con un controlador de motor de alta potencia.
Antes de elegir el control del motor tendrá que comprobar los requisitos para sus motores. Compruebe los requisitos de voltaje y corriente mirando las etiquetas o número de hardware de modelo y y Cruz esta referencia en la web.
Si usted está construyendo su robot desde cero puede optar por comprar un apagado el dispositivo útil para el control de los motores para su robot. Me parece que como un "hacedor" usted tiene que encontrar un equilibrio entre lo que es usted mismo y comprarlo...
Para un robot Arduino basado en elegir un protector de motor. Aquí está un Instructable agradable sobre el escudo del Motor de Arduino:
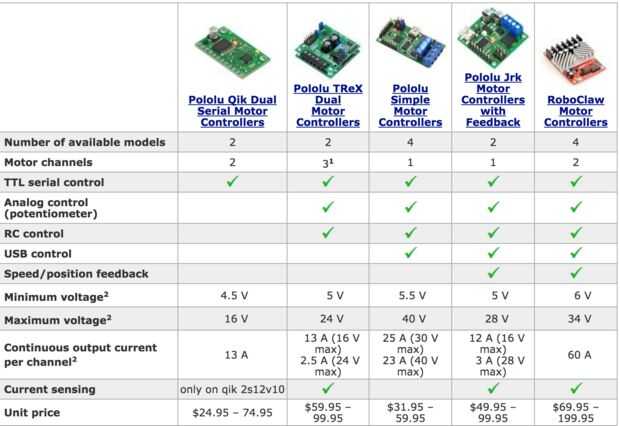
Para bots más grandes necesita algo que controlará más grandes necesidades de corriente y tensión como productos de Pololu y otros (tu investigación o pedir) https://www.pololu.com/category/10/brushed-dc-moto...
Si has elegido una plataforma móvil existente para hackear entonces se encuentra a medio camino allí basta con averiguar cómo controlar los motores eléctricos. Por lo general termino con plataformas que utilizan 12 y 24 voltios de tensión continua y los motores. Robots más pequeños podrían utilizar cualquier tensión pero usted probablemente querrá quedarse con al menos una base de 5 voltios. Tenga en cuenta que para cargas más grandes y se desea elegir un 12 o 24 voltios base de tiempo de ejecución.
En este punto debe saber cómo medir voltaje. Si no es así, aquí hay algunos enlaces de referencia:
http://en-US.Fluke.com/training/training-Library/t...
http://www.Dummies.com/how-to/Content/How-to-measu...
https://Learn.Sparkfun.com/tutorials/How-to-use-a-...
Notas: El poder en su automóvil y muchos dispositivos de electrónica es 12 voltios, por lo que usted encontrará una buena selección de conectores y fuentes de energía para esta baja tensión. Me parece que muchos de los conectores trabajará para los inferiores 5 voltios o aun superior 24 voltios. En 24 voltios se necesita alambre de calibre más grueso, fusibles e interruptores como la alta corriente puede quemar equipos diseñados sólo para 12 voltios o menor. Deben considerarse los componentes eléctricos del auto de alta calidad. Automoción (y tiendas del carro) también llevará fusibles para aplicaciones de alta corriente utilizadas en robots más grandes de 12v y 24v. Trossen robótica http://www.trossenrobotics.com/store/c/3407-Robot-...
lleva una buena selección de componentes para aplicaciones robóticas como http://www.robotshop.com.
Los componentes que usted elija dependerá de la complejidad de tu robot. ¿Lo apoyo autónomo o tele-op modo o ambos? El más que añade a su robot más complejo va a ser, empezar con lo básico.


 (utilizando un Arduino y un Netbook)")




 para hacer una funda teléfono móvil Slider...")





