Paso 6: Determinar el modo de operación (RC, nube, Autónoma)

Modo tele-Op
Usted tiene muchas opciones para elegir en el modo Tele-op. Un método popular es a través de RC. En robots móviles muchas veces el método que utilizamos para el movimiento se llama tanque de dirección.
Aquí está una buena explicación en MIT http://groups.csail.mit.edu/drl/courses/cs54-2001s...
Con este tanque de estilo de operación de la dirección general tendrá dos motores uno a cada lado del robot.
Si se establece este estilo, entonces pasemos a enviar comandos a tu robot para el control manual. Puede ser una comunicación serial a tu Arduino despedido de la Raspberry Pi.
RC (Control remoto) método de Tele-op
Utilizando el método de mando a distancia RC puede RC remoto controladores y receptores en Hobby King http://www.hobbyking.com
Considere el uso de estos combos de transmisor/receptor:
-Futaba
-Spektrum
-Turnigy
Elegir un RC remoto que se sentirán cómodo en las manos o con la sola operación de mano. Podrían ser útiles características:
-Apagado automático si el emisor pierde el contacto con el receptor (por seguridad)
-Opciones de batería buena
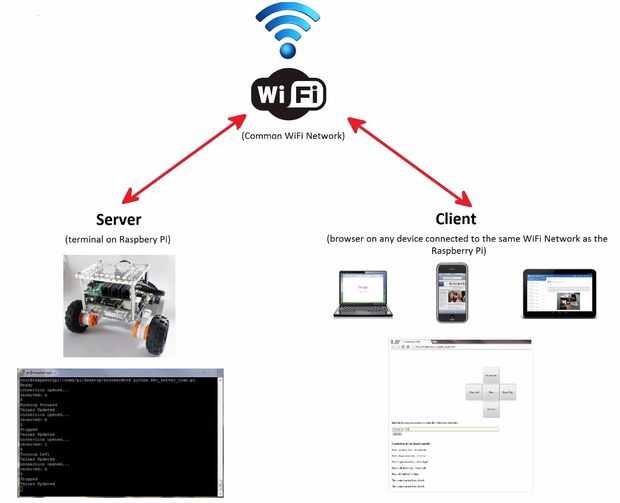
Método de Control conectados de Tele-op en la nube
El método de control de la nube de teleoperación de tu robot es una opción muy popular. Se puede controlar desde cualquier lugar desde un teléfono móvil, navegador, etc.... Y también tener la programación desde una ubicación remota significa que puede seguir avanzando cuando usted está ausente.
La gente sobre Dexter Industries http://www.dexterindustries.com/BrickPi/projects/b... tiene una visual agradable de otro método a través de su frambuesa Pi o micro-controlador o equipo.
Mediante una interfaz web puede enviar comandos a su frambuesa Pi y puede utilizar tanto el GPIO en el Pi usar esos comandos para interface a tu Arduino mediante un cable USB.
Usted puede utilizar un túnel seguro o VPN para controlar desde cualquier lugar del mundo con este método (no sólo su Wifi red local.)
Modo autónomo
Para llegar al modo autónomo queremos nuestra base móvil funcionamiento primero. Luego, debemos elegir un programa de computadora y sensores para automatizar los comandos que el robot funcione. Por ejemplo, si usted quiere un robot de evitación del obstáculo necesitamos algo básico como un sensor PIR o tan avanzado como https://en.wikipedia.org/wiki/Lidar Lidar.
Interacción Human-robot
Otro tema de interés puede ser la interacción de humanos-robot
https://en.wikipedia.org/wiki/Human – robot_interact...
Interacción Human-robot es un área donde la IA (inteligencia artificial) está ayudando a progreso de los seres humanos. Peinando las habilidades de aprendizaje de un robot y movimiento, sonido o vídeo podemos crear interacciones con nuestro robot podrían ser útil o simplemente entretenido.


 (utilizando un Arduino y un Netbook)")




 para hacer una funda teléfono móvil Slider...")





