Paso 2: cortar
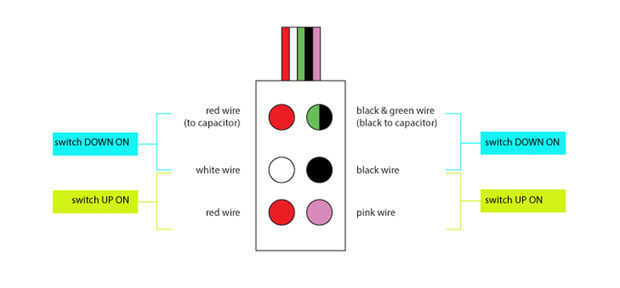
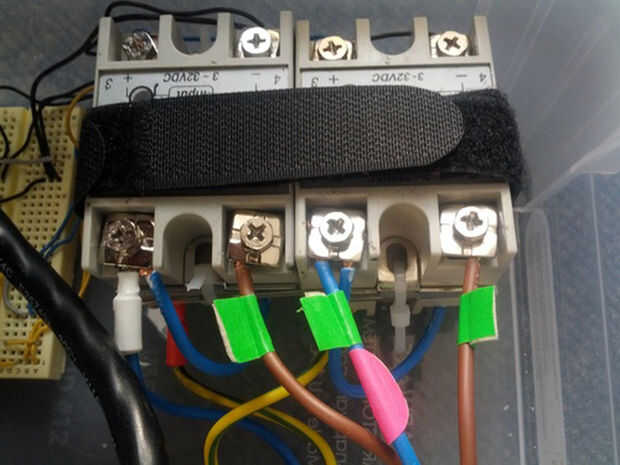


nuestra idea era replicar lo que hace el interruptor pendiente pero con un arduino. Por eso, hemos averiguado Cómo trabajaba el interruptor y con un multímetro nos dimos cuenta cuando presionas hacia abajo, el interruptor une dos pares de cables (rojos con blanco y negro/verde con negro). Similar a cuando usted presione (blanco con rojo) y negro con rosa. [Foto #1]
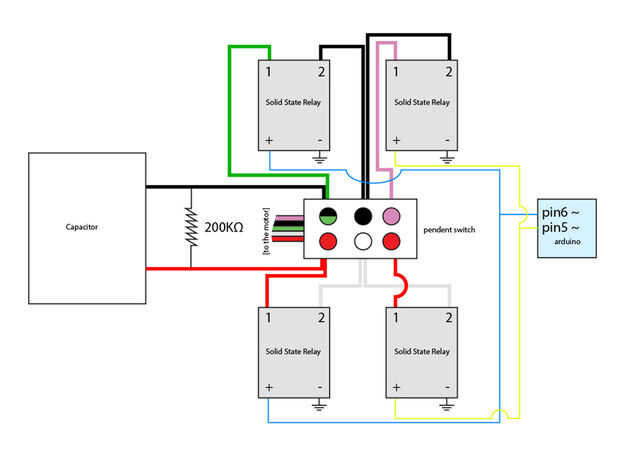
Así que el interruptor para ir arriba y abajo es como un par de interruptores para encender una lámpara de cada uno, por eso es que necesitamos 4 relés, y controlaremos con un arduino para cambiar cada par para mover el motor en todas las direcciones.
Puedes ver el diagrama abajo [Foto #2], también cómo se ve como en nuestro motor. Hemos tenido problemas de gestión de la dirección, pero Eric Rosenthal nos dio una explicación y una solución para el problema. Al control de motores de corriente alterna con los relés de estado sólido, los relés no descargan el condensador pero el interruptor lo hace de alguna manera. Así que cuando no se está descargando el condensador, el motor irá en la misma dirección de la carga. La solución es la inclusión de un resistor (200KΩ) entre dos terminales del condensador que se descarga el condensador cuando el motor no está funcionando (no tenemos 200KΩ de resistencia, así que hemos utilizado dos 100KΩ conectados en serie).
Después de haber hecho esto hemos hackeado también otro motor, pero éste tenía dos condensadores conectados en paralelo por lo que conecté 200KΩ en cada condensador (no estoy totalmente seguro sobre esto, pero funciona por lo menos) [Foto #8].
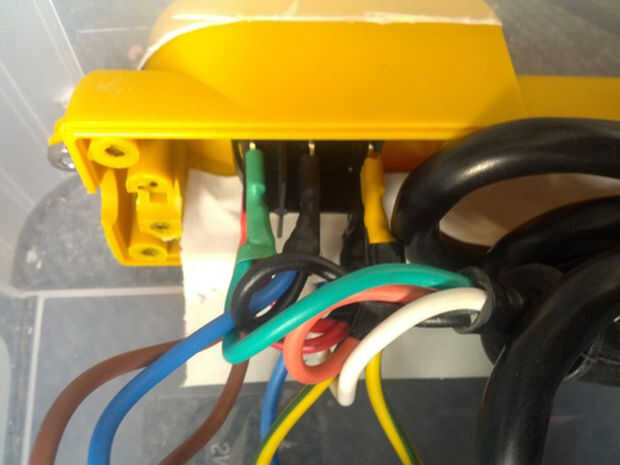
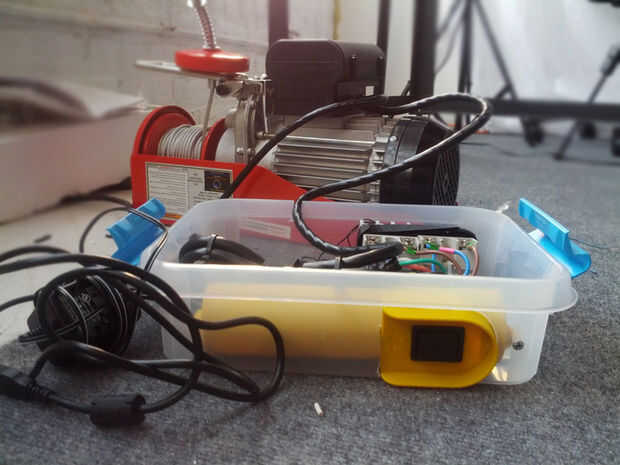
Para terminarlo, todo embalado en una caja de plástico y hemos hecho un agujero para poner el interruptor de pendiente y poder controlarlo desde el exterior de la caja sin tocar ninguna pieza electrónica, porque estamos trabajando con corriente alterna y queríamos estar seguro.






")





