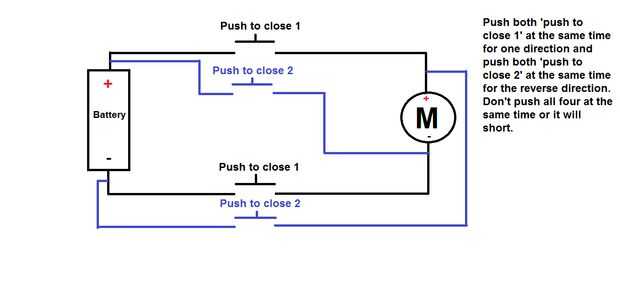
Cómo revertir un motor DC usando botones.
Artículos Relacionados

Arduino/Android-28BYJ 48 Stepper Motor control usando la HC-06
¡Hola mundo! Hoy hice una simple aplicación para encender y apagar un motor de 48 pasos de 28BYJ, sólo gira en una dirección. Voy a hacer una aplicación para controlar las cortinas de tu casa, con el mismo motor. Si desea el código fuente de la aplic

Motor de la C.C. multiplexor
Este multiplexor Motor DC permite controlar hasta cuatro motores de la C.C. en adelante y atrás usando un MOSFET y solo 5 pines digitales.Para esto insuperable se requiere:-Motores (utilicé salvados ventiladores DC)-El MOSFET (usé un 110v 30amp Asegú

Probador de Motor servo
Cuando usted compra un nuevo Servo motor y conectarlo al circuito, y si no rota, se podría pensar que el Servo puede estar defectuoso. Así cada vez cuando te enfrentas a este tipo de problema, que crees de la prueba de alguna manera. Así que aquí est
.")
Reemplazar un solenoide de arranque (Honda Civic 1999, motor D15B).
Mi oem arranque solenoide arranque dando problemas como en el coche se negó a comenzar! Después de hacer el mantenimiento del solenoide 17 años decidí que una nueva es necesario.El primer paso para reemplazar el solenoide es desconectar la batería de

Construir un motor Stirling de bajo costo para la generación de energía
Antes voy a empezar mi Instructables quiere hacer hincapié en que este no es un proyecto acabado y sigue en marcha a partir del momento estoy creando este Instructables. Ya pasé más de 3 meses haciendo esto aunque estoy cerca de realización todavía n

Bot de PS2 controlador de Motor de la cerda
esta es una variación del bot ahora común de la cerda. Es un poco más grande, con 3 pilas AA y el motor de la vibración de un controlador de juegos de PS2Paso 1: Materiales y herramientas necesarias Para los materiales, usted necesita:-4 cepillos de

Patín eléctrico con motores en la rueda
Paso 1: Reunir piezas Tener en cuenta que esta versión sigue siendo WIP (Work in Progress)Para hacer esta versión que necesita:-Un cubo de la rueda en los motores kit completo, que contiene las siguientes partes:-Motor del eje por lo menos 1 en la ru

Hacer su propia miniatura eje Motor eléctrico
motores de accionamiento eléctrico en la rueda representan un método eficaz de proporcionar la propulsión para los vehículos que de otra manera no se diseñaron impulsa las ruedas.Es decir, son grandes para EV hacking y conversión. Son compactas y mod

Arduino y puente completo Motor unidades
Muchos de ustedes pueden reconocer este circuito pero no estar de acuerdo en su nombre. La mayoría unidades de motor reversibles se llama uno de los tres nombres; Circuitos puente Push Pull, inversor de puente completo y puente H completos. Al igual

Motor Servo DIY
Motores de corriente continua se puede hacer que gire hacia la derecha o hacia la izquierda cambiando la polaridad de la tensión aplicada a sus terminales. El esfuerzo de torsión que se genera en el eje de salida se puede ampliar o reducido mediante

Guía completa de Motor para la robótica
Robot es un dispositivo electromecánico que es capaz de reaccionar de alguna manera a su entorno y toma decisiones autónomas o acciones para lograr una tarea específica.Entre desarrolla dispositivos mecánicos provocados por el hombre que puede mover

Control de un potente motor de DC con LabVIEW
Este artículo le mostrará cómo controlar un motor CC, usando un puente H con MOSFET complementario. Avatanjele el uso de transistores bipolares, MOSFET es que tienen menores pérdidas de conducción que bipolar. Las órdenes son dadas por un microcontro

RC el descifrar señales usando arduino
#ThugLifeRobotHey amigos allí,Hoy voy a mostrarles chicos cómo utilizar controladores de RC y decodificar sus señales para cualquiera de tus proyectosComo muchos de los que saben que podemos directamente utilizar servomotores con receptores RC desde

Control de dirección y velocidad de Motor DC con frambuesa Pi
Este es un simple guía cuando te enseña cómo controlar motores DC utilizando frambuesa pi. Acerca de raspberrypi - es un cradit tarjeta tamaño pequeño ordenador que tiene pernos GPIO de entrada salida de propósito general que se utilizan para control