Paso 3: Algunas notas sobre calibración


Para programar tu robot necesita utilizar Arduino para cargar código de control de impresora como Marlin.
A pie antes de que se puede ejecutar
Marlin tiene algunas programaciones de velocidad para cada motores - mover y sacar. Estos parámetros incluyen velocidad, aceleración y jerk. En mi experiencia con una máquina nueva configuración predeterminada para el movimiento de extrusión y z es manera demasiado alto. Te evitarás muchos problemas de calibración misterioso si usted reducir a la mitad la velocidad y la aceleración en el inicio. Puede siempre subes los mayores más adelante.
Has visto el resto antes de
Si has construido un Makelangelo antes, has visto el resto. Desafíos de calibración XYZ son las mismas. GCode es el mismo, con unos nuevos códigos. Movimiento es el mismo, pero más complicado. Código del robot es el mismo. Que has aprendido de tus letras y palabras, ahora podemos empezar a compartir grandes Ideas.
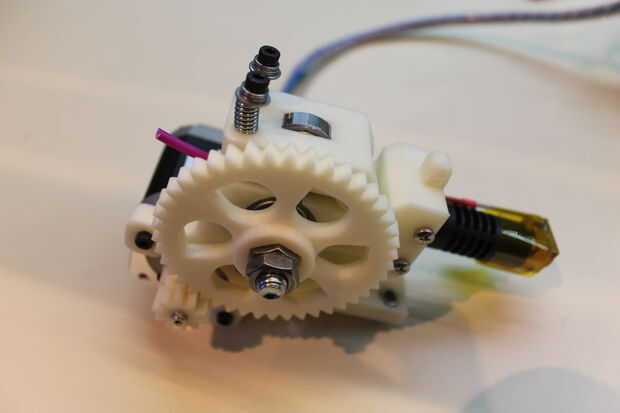
La novedad está fundiendo plástico
Usted puede empujar el plástico en el extremo caliente demasiado rápido y se atascará. Usted puede empujar demasiado lento y goteará por el extremo caliente, que es malo. Puede sobrecalentar o underheat y mermelada. Es mejor que to jam de goteo. Es mejor comenzar con un plástico como el ABS que no se sobrecaliente. Después de eso no dude en experimentar con PLA o cualquiera de los otros emocionantes nuevos sabores en el mercado.




")








