Paso 11: Realizar la unidad de paso completo en el código
Para simular el disco de paso completo con nuestro microcontrolador, necesitamos hacer que nuestras señales que le damos al motor paso a paso se arreglan de tal manera que las bobinas dentro del motor de pasos se energizan secuencialmente. Este bit que he mencionado anteriormente, pero es bueno verificar dos veces, de lo contrario su torpe cuando configuró todo derecho, pero no pasa nada porque se cambian un par de cables.
Para energizar una bobina especial, necesita recibir un bajo (0V) señal de tensión para que pueda fluir desde el centro de esa corriente aprovechado línea de 5V para el extremo de la bobina en 0V. Con el par de transistores Darlington, esto significa que necesitamos escribir digitalmente el pin asociado con esa bobina a una tensión alta de la lógica. Esta muy bien tiene sentido; conducir un pin alto para activar un electroimán y un perno baja para apagar un electroimán.
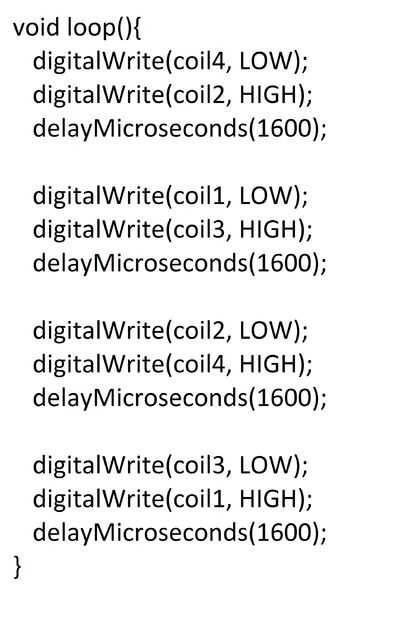
En la unidad de paso completo, dos electroimanes necesitan ser activado en un momento, que digitalmente escribimos dos electroimanes adyacentes (por ejemplo, bobinas de 2 y 3) alto y digital escribir los dos restantes electroimanes bajo. Entonces tenemos que aplicar una demora por tiempo suficiente permitir que el eje central empezar a movernos y llegar a su destino. He encontrado por ensayo y error que para mi motor paso a paso es de 1,6 milisegundos. Después de ese período de espera, podemos apagar uno de los electroimanes (tales como bobina 2) y luego encienda el siguiente electroimán (bobina 4 en este caso) y luego esperar y apagando el siguiente conjunto de bobinas.
Usted puede ver cómo este patrón podría en la imagen de arriba. El código real que usé en el archivo de texto siguiente.




![Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]](https://foto.askix.com/thumb/170x110/5/87/587864a8efe29028e8562de52b3ccc03.jpg "Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]")





")


