Paso 3: Configuración UART
Conexiones de UART tienen 4 canales de datos: RTS "Listo para enviar" RX "Recibir", TX "Transmitir" y CTS "claro para enviar". Las líneas RX y TX son las que realmente transmiten y reciben datos por lo que en la mayoría de los casos usted puede atar RTS y CTS a tierra (o a veces puede incluso dejas flotante). Hay también muchas conexiones de UART que sólo tienen conexiones RX y TX.
Una cosa importante a destacar en las conexiones de la UART es que la RX de un tablero se conecta al TX del otro y viceversa. Ahora echemos un vistazo a la hoja de datos de PmodGPS aquí.
Hay 6 conexiones a la PmodGPS. El primero se etiqueta 3DF que indica el estado de corrección postural del usuario. Cuando el módulo tiene un arreglo constante, el perno se mantiene baja y si el módulo es incapaz de hacer una corrección el pin cambiará cada segundo. Los pernos de segundo y terceros son las líneas RX y TX que realmente transmiten la información a nuestra junta. Pin 4 se llama 1PPS que conduce la línea alta de 100ms luego baja de 900ms y repite este proceso (honestamente no estoy seguro lo que el punto de es). Entonces por supuesto tenemos el terreno y 3.3V líneas para alimentar el módulo.
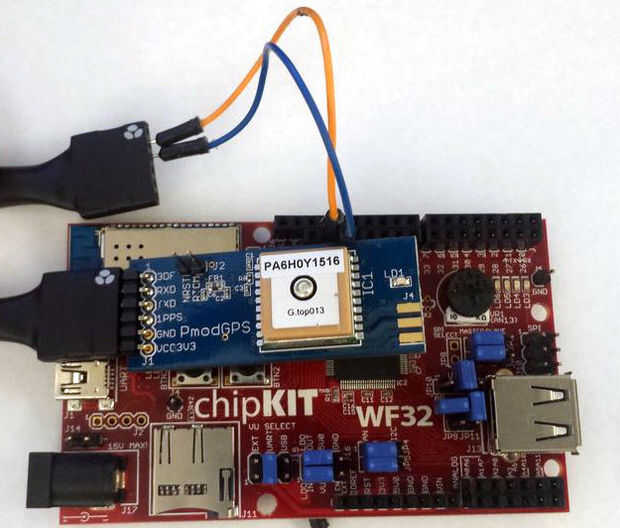
Ahora que sabemos que las conexiones, vamos a conectar el PmodGPS al chipKIT WF32. El chipKIT WF32 utiliza UART0 para comunicar con LabVIEW, así que tenemos que utilizar UART1 (técnicamente la hoja de datos llama a este UART4 pero hay una nota sobre cómo UART4 es acceder usando el objeto de tiempo de ejecución Serial1). UART1 son pernos 39 y 40. PIN 39 es el canal de RX y pin 40 es el canal de TX.
Así para la PmodGPS necesitamos conectar 3DF y 1PPS a GPIO entradas (si quieres leer los pins) y necesitamos conectar el canal de RX en el PmodGPS con conector de 40 en el WF32 y conectar TX en el PmodGPS al pin 39 en el WF32. También Conecte a tierra y 3.3V.




")

")






")