Paso 9: Pruebas de la sección de conductor del Motor
1. vueltas del motor una en una dirección durante 3 segundos a velocidad reducida
2. motor A se invierte durante 3 segundos a velocidad reducida
3. vueltas del motor A en la otra dirección durante 3 segundos a toda velocidad
4. invierte el motor A durante 3 segundos a toda velocidad
5. paradas de motor A
6. Repita los pasos 1. -5. con el motor B
7. comienza todo
El boceto se muestra a continuación y puede utilizarse para probar versiones de Junta de 2 a 5. Tenga en cuenta que las versiones de tablero de conductor del motor que no tienen una opción de velocidad variable siempre funcionará a toda velocidad.
Para probar el tablero, I:
un) conectados al DIYduino con Rx, Tx, GND y mi Arduino Uno como se muestra en paso 7 "Pruebas en la sección de DIYduino". También puede utilizar un USB Programador Serial si tienes uno.
b) conectado mi tensión motor solicitadas Vcc = 12 v a la entrada de energía DIYduino.
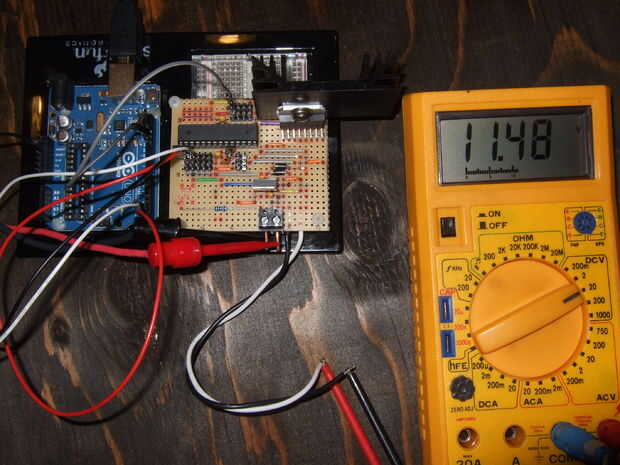
c) conectar un voltímetro a la salida del motor de la Junta. Esta placa había utilizada solamente una salida.
c) subido el sketch ' Boceto para pruebas DIYduino 3 en 1' se muestra a continuación.
d) visto el voltímetro y verifica que la tensión de alimentación al motor es:
(i) encendido
(ii) invertido
(iii) encendido
(iv) invertido
(v) apagado
en 3, 3, 3, 3 y 12 segundos, respectivamente.
Para controladores de motor de velocidad variable (version 3 y version 5) los dos primeros pasos deberían dar lugar a una salida de voltaje < Vcc. El segundo dos pasos deben salida Vcc.
Para controladores de motor de velocidad fija (versión 4 y versión 2) la salida debería ser siempre Vcc.
e) si usted construye un tablero de 2 canales, mover que las puntas de prueba de su voltímetro para el otro canal. Se debe observar el mismo patrón.
Esto concluye este instructable.
Buena suerte con tus robots.
Si le sucede a construir y utilizar una de estas placas en sus diseños, me encantaría verlos. Por favor subir algunas fotos.
Boceto para la prueba 3-en-1 DIYduino:
/ *---(Declarar Variables)---* /
int dir1PinA = 7; configurar pin de dirección 1 para un Motor con conector de 6
int dir2PinA = 8; configurar pin de dirección 2 para el Motor al pin 5
int speedPinA = 9; configurar pin de control velocidad PWM para Motor al pin 9
int dir1PinB = 12; configurar pin de dirección 1 para Motor B al pin 12
int dir2PinB = 13; conjunto Dirección 2 para el Motor B a pin pin 13
int speedPinB = 6; configurar pin de control velocidad PWM para Motor B al pin 6
void setup() / *** instalación: funciona una vez *** /
{
modos de juego pin
pinMode (dir1PinA, salida); para el motor A controlar la dirección
pinMode (dir2PinA, salida); para el motor A controlar la dirección
pinMode (speedPinA, salida); para una velocidad de control del motor
pinMode (dir1PinB, salida); para la dirección de control de motor B
pinMode (dir2PinB, salida); para la dirección de control de motor B
pinMode (speedPinB, salida); para la velocidad de control motor B
puesta en marcha con los motores parados:
Motor A
digitalWrite (dir1PinA, bajo);
digitalWrite (dir2PinA, bajo);
Motor B
digitalWrite (dir1PinB, bajo);
digitalWrite (dir2PinB, bajo);
} //--(end configuración)---
void loop() / *** LOOP: funcionamientos constantemente *** /
{
Motor gire A en la primera dirección con velocidad 100 en una escala de hasta 255
analogWrite (speedPinA, 100);
digitalWrite (dir1PinA, HIGH);
digitalWrite (dir2PinA, bajo);
Espere 3 segundos
Delay(3000);
Apague el motor una en segunda dirección con velocidad 100 en una escala de hasta 255
analogWrite (speedPinA, 100);
digitalWrite (dir1PinA, bajo);
digitalWrite (dir2PinA, HIGH);
Espere 3 segundos
Delay(3000);
Motor gire A en la primera dirección con velocidad 255 en escala hasta 255
analogWrite (speedPinA, 255);
digitalWrite (dir1PinA, HIGH);
digitalWrite (dir2PinA, bajo);
Espere 3 segundos
Delay(3000);
Apague el motor una en segunda dirección con velocidad 100 en una escala de hasta 255
analogWrite (speedPinA, 255);
digitalWrite (dir1PinA, bajo);
digitalWrite (dir2PinA, HIGH);
Espere 3 segundos
Delay(3000);
parada de motor A
digitalWrite (dir1PinA, bajo);
digitalWrite (dir2PinA, bajo);
Motor de giro B en la primera dirección con velocidad 100 en una escala de hasta 255
analogWrite (speedPinB, 100);
digitalWrite (dir1PinB, HIGH);
digitalWrite (dir2PinB, bajo);
Espere 3 segundos
Delay(3000);
Motor de giro B en segunda dirección con velocidad 100 en una escala de hasta 255
analogWrite (speedPinB, 100);
digitalWrite (dir1PinB, bajo);
digitalWrite (dir2PinB, HIGH);
Espere 3 segundos
Delay(3000);
Motor de giro B en la primera dirección con velocidad 255 en escala hasta 255
analogWrite (speedPinB, 255);
digitalWrite (dir1PinB, HIGH);
digitalWrite (dir2PinB, bajo);
Espere 3 segundos
Delay(3000);
Motor de giro B en segunda dirección con velocidad 100 en una escala de hasta 255
analogWrite (speedPinB, 255);
digitalWrite (dir1PinB, bajo);
digitalWrite (dir2PinB, HIGH);
Espere 3 segundos
Delay(3000);
parada de motor B
digitalWrite (dir1PinB, bajo);
digitalWrite (dir2PinB, bajo);
} //--(end bucle principal)---



")








