Paso 3: Combinar esquemas de DIYduino y controlador de Motor
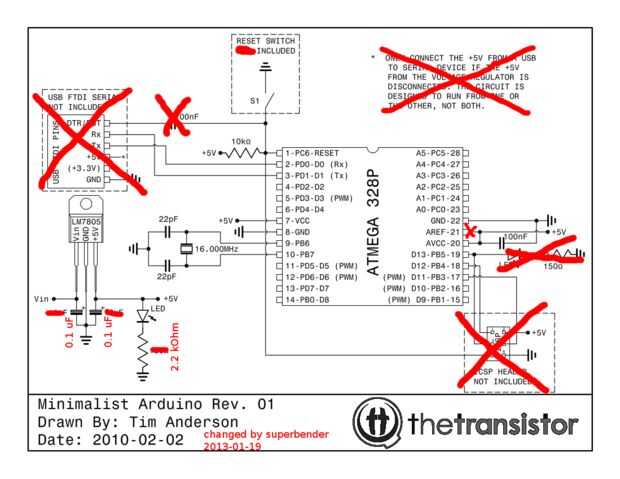
En el esquema que se muestra a continuación he marcado mis cambios en color rojo:
1. cruzado hacia fuera los artículos que no eran parte de mi construcción.
2. se ha cambiado los valores de los condensadores que suavizar posibles picos de tensión en el regulador de 5V. Estos son los valores que tenía en mi stock y hacer el trabajo.
3. tachado el LED/resistor conectado al Pin13 a partes de seguridad. Sólo conecté un LED/resistor temporalmente para probar la funcionalidad de la DIYduino como se describe más adelante.
4. quitar los + 5V de la Aref como se recomienda en un comentario con respecto a este tutorial: http://arduino.cc/forum/index.php/topic, 7569.0.html
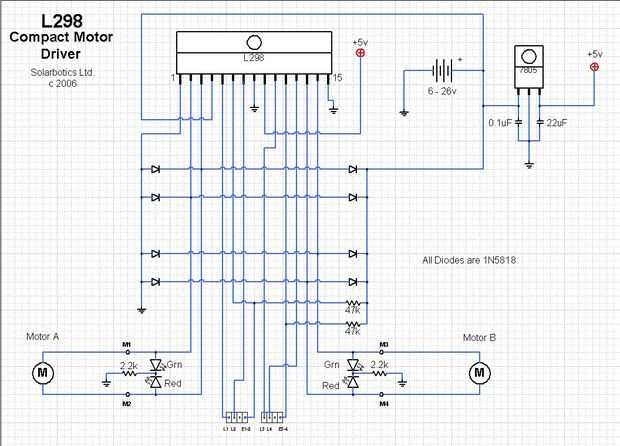
Luego combiné el esquema minimalista de Arduino con un
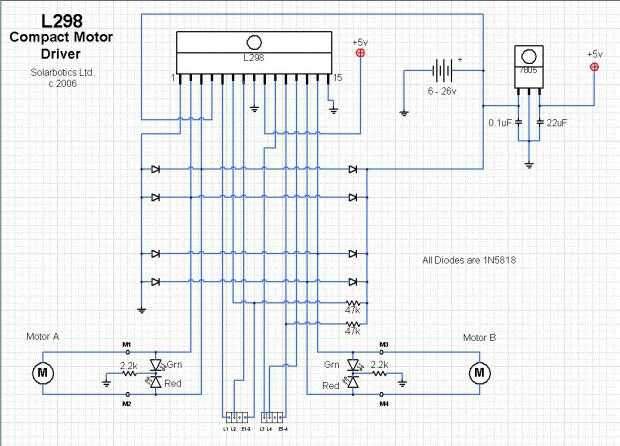
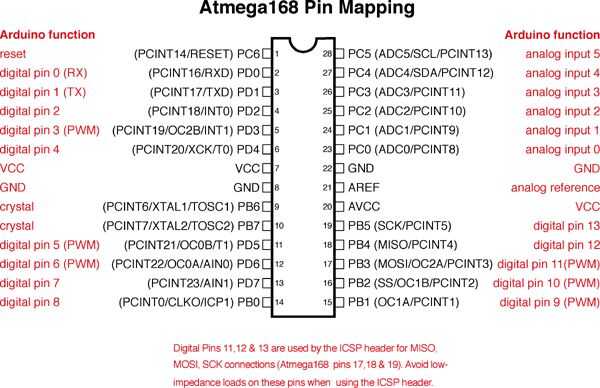
que encontré en el sitio de solarbotics. Lo hice por conectar L1, L2, L3 y L4 (L298N pins 5, 7, 10 y 12) a digital del ATMEGA pines 7, 8, 13 y 12, respectivamente. Pines E1-2 y E3-4 (L298N pins 6 y 11) están conectados a + 5V para la velocidad máxima del motor a veces o a Arduino PWM pins 9 y 6 para velocidad del motor ajustable, respectivamente. También estoy mostrando el mapa de pin de ATMEGA 168/328, que me ayude a asignar los pines ATMEGA adecuados y que puede encontrarse en http://arduino.cc/en/Hacking/PinMapping168.



")








